
智身科技机器狗助力曼彻斯特大学,勇夺IROS 2025四足机器人挑战赛冠军
在2025年10月23日刚刚落幕的杭州IROS 2025四足机器人挑战赛中,来自曼彻斯特大学的ZsiMan高校战队使用智身科技钢镚L1机器狗平台,从众多顶尖团队中脱颖而出,首次参赛即夺得冠军。

IROS(智能机器人与系统国际会议)与ICRA并称为机器人领域两大顶级国际会议,是全球机器人学术界和产业界展示前沿研究成果的重要平台。Quadruped Robot Challenge(QRC)四足机器人挑战赛是IROS的传统赛事,以其高难度的赛道设计和严格的评分标准闻名,可以说是机器狗领域的“奥运会”。

挑战赛特别注重考验机器人在极限环境下的运动能力、自主决策能力和系统可靠性,历年吸引了包括麻省理工学院、苏黎世联邦理工学院等世界顶尖机器人实验室的参与。在历年冠军中,使用的比赛机器大多均为海外品牌,如波士顿动力等,2024年的挑战赛中,中国宇树科技首次作为比赛用机获得冠军。

智身科技产品钢镚L1实力强劲,本次作为唯一一款非宇树的比赛用机,创造了新的挑战赛的冠军比赛用机纪录,也彰显了中国具身智能和机器人技术的雄厚实力。
本届比赛共有来自顶尖高校约7支队伍参赛,出现了体重达50公斤级的大型机器狗与仅15公斤级的钢镚L1同场竞技的场面。比赛现场设置了极具挑战性的竞赛环境,包含楼梯、阶梯场地、K型护栏、托盘堆、坡道等多种复杂地形,全面考验机器人的运动稳定性、越障能力和环境适应性。
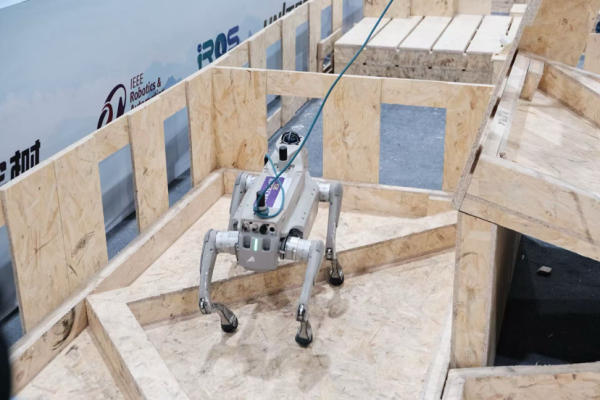
随着比赛的进行,障碍高度与地形复杂度逐渐升级,对自重较轻的小型机器狗提出了更为严峻的考验。然而,钢镚L1以其卓越的综合性能通过了初赛、预赛、半决赛,一路杀入决赛夺冠,从而证明在智能算法时代,精巧设计同样能够战胜体型优势。
作为首次参赛的黑马选手,钢镚L1机器狗的夺冠得益于其遥遥领先的技术架构:
- 强大的硬件本体
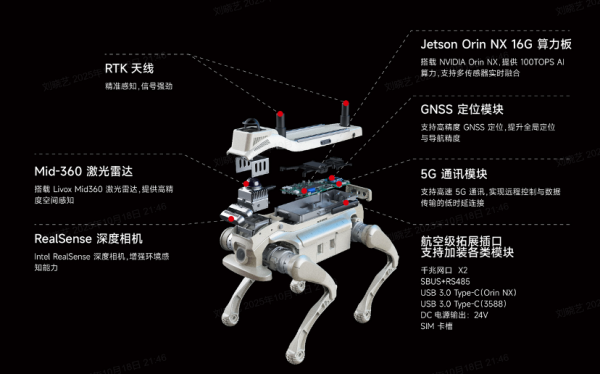
钢镚L1采用智身科技自研的关节模组,峰值扭矩达48N·m,为同级别产品中的最高水平,运动能力不输大体型机器狗。同时,本次比赛用机还搭载了智身科技的智航EDU高性能套件,精选Intel RealSense深度感知摄像头、Livox Mid360激光雷达以及NVIDIA Orin NX计算单元,形成了多模态感知能力与边缘计算能力的完美结合。
高达100TOPS的AI计算性能,能够实时处理多传感器数据流,轻松应对复杂多变地形。搭配智身科技自研的RoamerX导航平台,提供高效导航框架rmx_lite,在快速训练部署后就能自主运行。
- 前沿的仿真训练平台
智身自研的开源高保真科研仿真环境MATRiX,提供物理精确的虚拟实验环境,支持运动控制、导航算法、视觉算法等多种研究任务的仿真验证。完整的仿真-部署工具链为学生团队提供了强大的研发支持。通过MATRiX仿真平台,团队能够在高保真虚拟环境中进行算法训练;结合开放的软件架构,实现从仿真验证到实机部署的无缝衔接。这一流程将算法迭代周期缩短了70%,让学生团队能够在赛前针对各种可能地形进行充分准备。

- 科研智慧驱动赛场卓越表现
ZsiMan战队的指导老师潘为教授在此次比赛中发挥了关键作用。作为曼彻斯特大学计算机科学系机器学习专业副教授,他同时也担任智身科技首席科学家。其研究广泛涉及基于机器学习的机器人控制及动态控制原理,在相关前沿领域具有深厚的学术积累。
潘为教授促成了将钢镚L1机器狗引入曼彻斯特大学实验室的合作。在他的指导下,研究团队利用钢镚L1开源平台进行了深入的二次开发,将先进算法应用于机器狗的运动控制中。团队在真实的机器人平台上验证理论创新,最终在比赛中展现出卓越的技术实力。
此次夺冠,不仅展现了曼彻斯特大学潘教授团队卓越的算法开发能力,更在顶尖赛事的严苛环境下,实证了钢镚L1机器狗从智能算法、核心硬件到开发平台的全链路技术优势。它标志着一种结合了强大本体性能与高度智能、且能快速赋能科研的创新机器人平台,正展现出其不可小觑的竞争力。
好文章,需要你的鼓励


AI智能体漏洞挖掘成本骤降,Anthropic呼吁AI防御
Anthropic发布SCONE-bench智能合约漏洞利用基准测试,评估AI代理发现和利用区块链智能合约缺陷的能力。研究显示Claude Opus 4.5等模型可从漏洞中获得460万美元收益。测试2849个合约仅需3476美元成本,发现两个零日漏洞并创造3694美元利润。研究表明AI代理利用安全漏洞的能力快速提升,每1.3个月翻倍增长,强调需要主动采用AI防御技术应对AI攻击威胁。

NVIDIA联手多所高校推出SpaceTools:AI机器人有了“火眼金睛“和“妙手回春“
NVIDIA联合多所高校开发的SpaceTools系统通过双重交互强化学习方法,让AI学会协调使用多种视觉工具进行复杂空间推理。该系统在空间理解基准测试中达到最先进性能,并在真实机器人操作中实现86%成功率,代表了AI从单一功能向工具协调专家的重要转变,为未来更智能实用的AI助手奠定基础。

Spotify年度盘点2025首次推出多人互动功能“盘点派对“
Spotify年度总结功能回归,在去年AI播客功能遭遇批评后,今年重新专注于用户数据深度分析。新版本引入近十项新功能,包括首个实时多人互动体验"Wrapped Party",最多可邀请9位好友比较听歌数据。此外还新增热门歌曲播放次数显示、互动歌曲测验、听歌年龄分析和听歌俱乐部等功能,让年度总结更具互动性和个性化体验。

机器人学会“三思而后行“:中科院团队让AI机器人告别行动失误
这项研究解决了现代智能机器人面临的"行动不稳定"问题,开发出名为TACO的决策优化系统。该系统让机器人在执行任务前生成多个候选方案,然后通过伪计数估计器选择最可靠的行动,就像为机器人配备智能顾问。实验显示,真实环境中机器人成功率平均提升16%,且系统可即插即用无需重新训练,为机器人智能化发展提供了新思路。
2025
10/23
17:50
分享
点赞

AI测试成数智化合规必选项,驱动企业高质量发展
AI智能体漏洞挖掘成本骤降,Anthropic呼吁AI防御
Spotify年度盘点2025首次推出多人互动功能"盘点派对"
英国SAP用户因商业套件重启授权迷局感到困惑
AWS发布Graviton5定制CPU,为云工作负载带来强劲性能
美光放弃Crucial品牌:告别消费级存储市场
手机里的NPU越来越强,为什么AI体验还在原地踏步?
如何使用现有基础设施让数据做好AI准备
IT领导者快问快答:思科光网络公司首席数字信息官Craig Williams分享AI转型经验
Anthropic CEO警告AI行业泡沫化,批评"YOLO"式投资
雅虎利用AI实时总结橄榄球比赛精彩内容
押注AI智能体,奇奇科技跨越十年的“换挡”与远航
