
百元智能手机激光雷达实现"透视转角"成像
激光雷达(Lidar)技术此前已被用于探测隐藏在转角后方的物体,但这项能力长期依赖价格高昂的实验室级设备。一项最新研究表明,售价不足100美元的消费级智能手机激光雷达同样能够实现转角成像。
麻省理工学院媒体实验室博士生Siddharth Somasundaram表示,这一突破蕴含广泛的应用潜力。"在自动驾驶领域,转角感知技术可以帮助自动驾驶汽车在其他车辆、骑行者或行人进入直接视野之前就完成探测,从而提升盲区路口和遮挡路段的行驶安全性。在机器人领域,该技术则可协助机器人在杂乱或局部遮挡的环境中完成导航。"
Somasundaram还强调了这项研究更深远的意义:"我们认为最重要的影响在于技术的普及化。当此类技术变得触手可及,人们往往会发现远超原始研究者预想的应用场景。"目前,研究团队已公开发布了实现这一功能所需的全部代码。
激光雷达的工作原理与感知局限
激光雷达正日益为自动驾驶汽车、无人机、机器人和智能手机赋予三维扫描能力。其传感器的工作方式类似雷达利用无线电波的原理——向目标位置发射激光,并通过分析反射脉冲的返回时间来计算距离,进而生成三维空间地图。
通过分析从反射面弹回的激光脉冲,激光雷达可以"看见"不在直接视线范围内的物体,例如隐藏在转角后方的目标。然而,最初实现此类非视线成像的方案"依赖极为专业的科学设备,造价通常在50万至100万美元之间",Somasundaram指出,"这些系统体积庞大、造价高昂,只能在实验室环境中使用。"
消费级传感器的意外潜力
随着时间推移,单光子探测器等高性能传感器开始出现在消费电子产品中。Somasundaram表示:"当我们开始对这些传感器展开实验时,意识到即便是现成的消费级设备,实际上也在捕捉微弱的转角信号。"
然而,能够捕捉信号并不等同于可以真正用于非视线成像。消费级激光雷达出于眼部安全考量,通常采用低功率激光,采集的图像往往噪点较多;同时,此类设备的传感器分辨率相对较低;此外,相机与目标物体的移动也会造成图像模糊。Somasundaram坦言:"确实有过一些时刻,我们不确定有意义的成像是否真的可行。"
多帧融合算法破解难题
为克服上述挑战,研究团队没有基于单帧图像数据尝试非视线成像,而是转向同时分析多帧图像的策略。他们从智能手机相机连拍功能中获得灵感——连拍可通过合并多张照片来提升画质;同时借鉴了卫星成像中合成孔径雷达的原理——该技术通过融合多个天线的信号,达到单一大型天线的成像质量。
"一旦我们开发出能够跨帧整合信息的算法,隐藏信号便开始更加清晰地浮现出来。"Somasundaram说道。
实验结果与现实局限
研究团队在实验中使用了一套便携式智能手机激光雷达系统,该系统约有100个像素点,每个像素点均由激光发射器与单光子探测器组合而成。借助该系统,他们成功重建了静止隐藏物体的三维图像,并追踪了已知形状隐藏物体的三维运动轨迹。此外,他们还能利用隐藏物体作为地标来精确定位激光雷达传感器的位置——这一能力对于机器人在缺乏纹理特征的环境中保持定向具有重要价值,而此类环境恰恰是机器人导航的难题所在。以上成果均在无需专业标定的条件下实现。
Somasundaram表示:"令我最感意外的是,这些消费级激光雷达系统竟然能从转角处捕捉到任何有用的信号。光线经过多次反射后抵达传感器时已极为微弱,而这些设备的设计初衷根本不包含此类成像需求。能够证明其中蕴含足够的信息来重建和追踪隐藏物体,对我们来说是非常令人振奋的发现。"
不过,他也提醒外界不要将该系统想象为"能够生成隐藏场景完整照片的装置。目前系统从极微弱的信号中恢复的,只是稀疏的几何与运动信息",与人们日常使用手机拍摄的高像素细节图像之间,"仍存在相当大的差距"。
未来研究方向
现有系统假设物体的形状和运动在帧与帧之间保持相对一致,"这使我们能够将大量极微弱的测量值合并为更强的信号",Somasundaram解释道。但他同时指出,这一假设在某些情况下可能失效:例如人体姿势发生变化、物体被遮挡导致形状和运动看似改变,或激光雷达传感器本身出现突然移动等。
"降低系统对这些假设的依赖程度,是未来工作的重要方向之一。"他表示,更优化的物理模型、信号处理方法以及机器学习技术,"有望帮助系统适应更复杂的运动和场景动态。随着时间推移,我们期望这些方法能让转角感知在真实、无约束的环境中更加稳健可靠。"
在硬件层面,研究团队也着眼于对激光雷达设备本身进行改进。Somasundaram指出:"目前消费级激光雷达系统主要针对常规视线成像和深度感知而设计。如果未来的激光雷达硬件在设计之初就同时考虑可见场景与隐藏场景的理解需求,结果将会如何?提升传感器灵敏度、分辨率、扫描策略或光学设计,都有望显著改善非视线成像性能。"
相关研究成果已于5月20日在线发表于《自然》期刊。
Q&A
Q1:消费级激光雷达为什么之前无法用于转角成像?
A:消费级激光雷达主要面临三大障碍:第一,出于眼部安全考量使用低功率激光,导致采集图像噪点多;第二,传感器分辨率较低;第三,相机与目标物体的移动会造成图像模糊。这些因素共同导致捕获的转角信号极为微弱,难以用于实际成像。
Q2:MIT的研究团队用什么方法解决了信号噪声问题?
A:研究团队的核心突破在于放弃依赖单帧图像进行成像,转而同时分析多帧图像。他们受到智能手机连拍合成以及卫星合成孔径雷达技术的启发,开发出能够跨帧整合信息的算法,将多个极微弱的测量值叠加融合,使隐藏物体的信号得以更清晰地呈现。
Q3:转角激光雷达技术目前有哪些实际应用局限?
A:目前该系统恢复的只是稀疏的几何与运动信息,尚无法生成完整清晰的隐藏场景图像。此外,系统依赖物体形状与运动在帧间保持一致的假设,当人体改变姿势、物体被遮挡或传感器本身突然移动时,该假设可能失效,导致成像效果下降。
好文章,需要你的鼓励

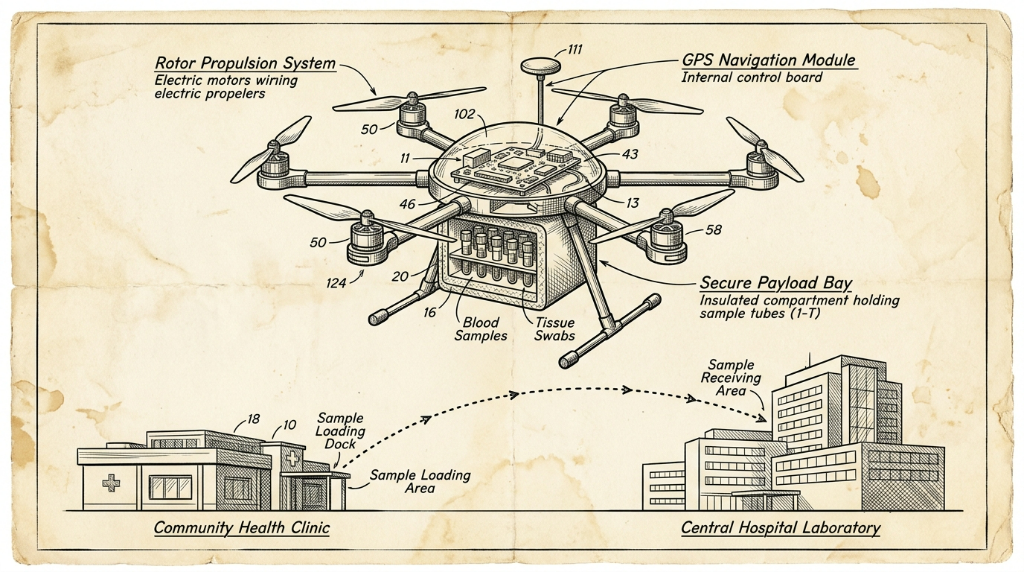
英国NHS无人机快递医疗样本服务正式落地伦敦
英国国家医疗服务(NHS)正将无人机纳入常规医疗物流体系。自今年2月起,无人机每天在雷恩斯公园和圣乔治医院之间运送血液等诊断样本,飞行仅需3分钟,比公路运输快约85%,且碳排放减少高达98%。目前已有逾2000名患者受益。NHS计划将该服务扩展至圣赫利尔、克罗伊登等多家医院,最终惠及约180万名患者。该网络由英国医疗初创公司Apian与谷歌旗下Wing合作运营。
Explyt团队打造的代码智能体评测新标准:光靠“通过/失败“根本不够用
AgentLens是Explyt公司联合俄罗斯学术机构开发的AI编程助手评测基准,通过分析完整人机交互轨迹而非仅看最终结果,从五个维度评估代码智能体的真实表现。
Aetina宣布支持英伟达Jetson T3000和T2000 AI模块
边缘AI计算厂商Aetina宣布,将在其DeviceEdge AIE-KT风冷系列和新款AIE-PT无风扇平台上支持英伟达全新Jetson T3000和T2000模块。T3000基于Blackwell GPU,最高提供865 FP4 TFLOPS算力,功耗70W;T2000则提供400 FP4 TFLOPS,面向视觉AI代理和自主移动机器人等场景。两款模块预计2027年第一季度上市,支持Nemotron、Cosmos 3等英伟达AI软件生态。
机器人的“触觉觉醒“:韩国梨花女子大学如何让小型AI模型在不忘记视觉的前提下学会“感受“材质
韩国梨花女子大学提出Splash框架,通过识别AI模型中的"休眠参数"并只在其中训练触觉能力,让小型多模态AI在学会感知材质触感的同时,完整保留原有视觉语言推理能力。
2026
06/29
18:36
分享
点赞

WAIC2026 现场直击:开普勒顶流人气王,麒麟系列火爆出圈
面壁智能将密度定律带入具身智能
龙磁科技拟投3.58亿元扩建越南永磁铁氧体基地
首创一层Scale-up网络256卡全互联,摩尔线程MTT C256超节点为万卡及十万卡级集群夯实底座
从高血压诊疗入手,北京安贞医院让医疗大模型走出聊天框
西门子肖松:以场景为牵引,推动工业AI从单点实效迈向生产力跃迁
打造Token极致性价比 新华三震撼亮相2026世界人工智能大会
机器人管家系统上线!傅利叶携多款康养陪伴新品方案亮相WAIC 2026
赛那德“ 自主作业机器人天团” 登陆 WAIC:iLoabot-X+模型双升级,秀出具身场景落地硬实力
西门子Eigen工程智能体中国首发首展,荣获2026 WAIC SAIL之星奖
NVIDIA Cosmos 推动物理 AI 前沿发展
PPIO亮相WAIC 2026:发布智能模型网关,打造面向Agent时代的智能Token工厂
