
英伟达发布通用机器人模型RVT-2,训练效率提升6倍
随着AI技术的飞速发展,在工业和家庭领域中构建能够精确操作且仅需少量任务演示的通用实体机器人成为可能。例如,在工业制造中,人们希望实体机器人能够通过几次演示就学会高精度任务,如拧螺丝、搬货物等。
之前的PerAct、RVT等通用模型,在训练方面有一定的优势但还是有不少局限性。PerAct采用多任务模型,通过预测下一关键帧姿态来进行3D操作,但它使用的基于体素的场景表示限制了其扩展性。
RVT虽然解决了PerAct的一些功能缺陷,但在处理需要高精度的任务时仍存在困难。所以,英伟达的研究人员在RVT基础之上研发出了第二代,训练效率比第一代快6倍,推理效率快2倍,仅10次示范学习就能执行各种高精度任务。
在架构方面与RVT相比,RVT – 2进行了大幅度改进并引入了多阶段推理管道。在处理对象非常小且需要非常精确的抓手姿态的任务时,例如,在孔中插入销钉,之前RVT使用的固定视图可能无法完成。
RVT - 2采用了多阶段设计,在第一阶段使用固定视图预测感兴趣区域,然后在该区域进行放大并重新渲染图像,使用放大后的特写图像进行精确的抓手姿态预测。
RVT – 2还采用了凸上采样技术。RVT基于ViT,在预测热图时,会将图像tokens特征上采样到图像分辨率,这一过程内存消耗大。
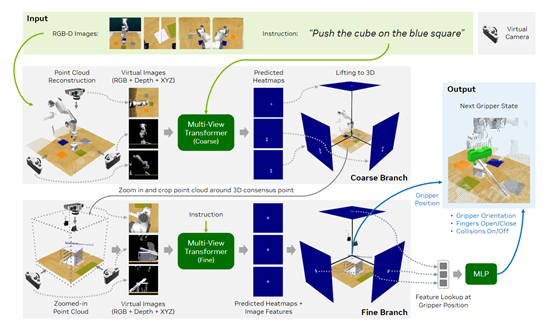
RVT - 2去除了特征上采样,直接从tokens分辨率的特征预测热图形状,使用凸上采样层,通过学习到的凸组合来进行预测,不仅节省了内存,还不会牺牲性能。
此外,RVT - 2对网络参数进行了合理化调整。RVT中一些网络参数,如虚拟图像大小和补丁大小,可能不是GPU友好的。R
VT - 2采用了类似于ViT的参数,如224的图像大小和14的补丁大小,这不仅使神经网络更适合GPU,还减少了多视图变压器内部tokens的总数,进一步提高了效率。
在旋转预测方面,RVT和PerAct使用全局视觉特征来预测末端执行器旋转,但当存在多个有效末端执行器位置且旋转依赖于位置时会出现问题。RVT - 2使用从末端执行器位置的特征图中汇集的局部特征进行旋转预测,实现了位置相关的旋转预测。
RVT渲染场景点云时使用了五个虚拟相机,分别放置在正交位置。但在RVT - 2的多阶段模型中,研究发现仅使用三个视图就足够了,且不会牺牲性能。
这是因为RVT - 2在最终预测中使用了放大后的视图,减少虚拟视图数量可以减少渲染器需要渲染的图像数量和多视图变压器需要处理的令牌数量,从而提高了训练和推理效率。
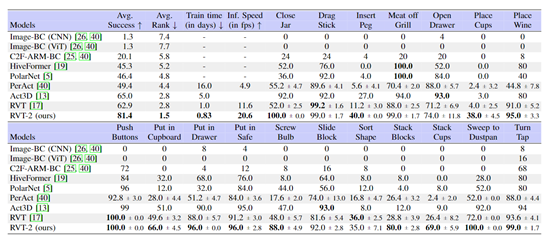
为了评估RVT - 2的性能,研究人员在模拟和现实世界中进行了综合实验。在模拟实验中,使用了RLBench中的18个任务进行测试,包括推按钮、放置物品和需要高精度的插销等任务。每个任务有2到60个变化,如处理不同颜色或位置的对象。
实验结果表明,RVT - 2在训练时间和性能上显著优于之前的模型。在训练时间方面,RVT - 2在相同计算资源下比RVT训练效率快6倍,推理效率快2倍。
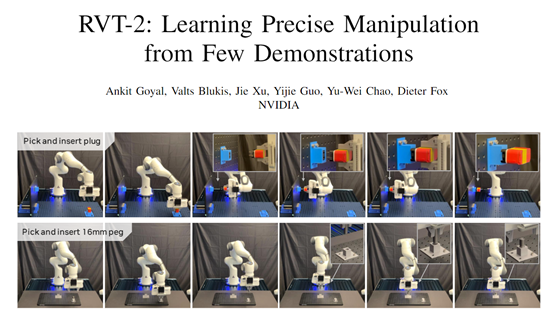
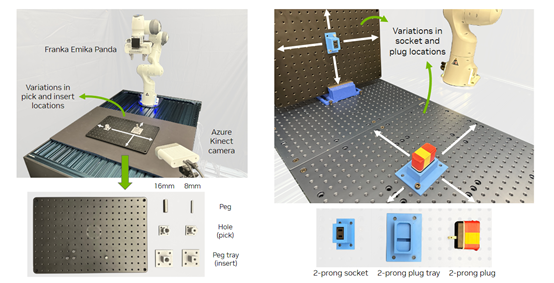
在现实世界实验中,除了RVT中使用的堆叠方块、按压消毒器、将标记物放入杯子/碗中、将物体放入抽屉、将物体放入架子5个任务外,还增加了三个来自IndustRealKit的高精度任务,拾取并插入16mm销钉、拾取并插入8mm销钉、拾取并插入插头。
实验结果显示,RVT - 2在5个来自RVT的任务中,比RVT的性能相对提高了12.5%。在所有3个新的高精度任务上,RVT - 2的平均成功率为53.3%,而RVT为33.3%。
论文地址:https://arxiv.org/abs/2406.08545
好文章,需要你的鼓励


苹果在印度恢复银行卡支付功能,距暂停已逾四年
苹果已开始在印度分阶段恢复Apple账户的信用卡支付功能,用户可绑定Visa和Mastercard信用卡及借记卡,用于购买iCloud+、Apple Music订阅及App Store应用。此前,由于印度储备银行于2021年推出新的周期性支付监管框架,苹果于2022年5月暂停了该支付方式。此次恢复标志着苹果在适应各国本地化监管要求方面的持续努力,同时也引发外界对苹果是否将在印度推出Apple Pay的新猜测。

腾讯混元团队打破AI“记忆瓶颈“:让大模型像人一样拥有超长记忆的新突破
腾讯混元等机构提出HiLS-Attention,通过端到端可学习的分层稀疏注意力机制,让大模型在超长上下文推理中比全量注意力快14倍,同时检索准确率更高。

Bookshop.org确认今年将推出Kobo电子书阅读器支持
Bookshop.org创始人Andy Hunter证实,与Kobo的合作集成将于今年落地。此前该计划历经多次推迟,网页措辞一度从"2026年"改为"未来某时"。Hunter表示,双方已就商业条款达成一致,工程团队正将资源重新投入Kobo支持开发,但尚无具体上线日期。该集成将支持数字版权管理要求,让用户通过Bookshop.org购买电子书,同时支持独立书店。

DeepSeek-AI与北京大学联手破局:AI聊天机器人“慢速打字“的终极解决方案
DSpark是DeepSeek与北京大学提出的投机解码框架,通过半自回归生成和置信度调度验证两项创新,将DeepSeek-V4用户生成速度提升60%至85%。
2024
12/30
11:04
分享
点赞

