
当大家都在期待苹果的机器人时,苹果却先造了个“台灯” 原创
作为全球消费电子巨头,苹果早在去年就被曝出,将进入机器人领域。
当时外媒报道称,苹果正在开发一款桌面机器人,该设备整合了一个类似iPad的显示屏和一个机械臂,以及苹果的人工智能技术,显示屏可以360°旋转,并可作为家庭控制中心。
这一项目的负责人据称是苹果此前负责自动驾驶汽车项目的技术副总裁的Kevin Lynch,它也负责过苹果Apple Watch项目。
如今,这个桌面机器人相关项目资料以研究论文的形式对外曝光。

台灯机器人,让皮克斯照进现实
1985年,苹果传奇创始人乔布斯被董事会和他亲自请来的CEO斯卡利赶出了自己一手创办的公司苹果,不过,在这一年,对计算机图形学有浓厚兴趣的乔布斯花1000万美元投资了卢卡斯影业的电脑部门。
独立后的卢卡斯影业电脑部门有了一个在后来为众人熟知的名字,皮克斯(Pixar)。
虽然乔布斯投资皮克斯出于对于皮克斯的电脑和软件设计能力看好,但同样有着他对设计艺术的个人情怀。
在乔布斯与皮克斯正式达成投资协议的1986年,为了展示皮克斯的硬件和软件,以推动电脑和图像渲染软件的商业化,乔布斯和新成立的皮克斯团队决定制作一部动画短片,参加这一年的SIGGRAPH大会。
这部短片就是《顽皮跳跳灯》(Luxo Jr.),这部仅有两分钟的动画,在1986年SIGGRAPH大会上火爆全场,并在当年获得了奥斯卡奖项提名。
时隔四十年后,当苹果决定进入机器人领域时,第一款闯入大众视野的,很可能也正是以当年这款跳跳灯为原型的机器人,一款看上去不那么像机器人的机器人。
这款机器人出现在近日苹果机器学习研究团队的对外公开的研究论文中。
在这篇论文中,苹果机器学习研究团队展示出的这款台灯机器人,可以通过语音、手势控制,还富有情感表达和更多AI功能。
例如,它会通过点头、摇头动作表示对你的观点的赞同或不赞同,通过不同运动路径向你表达它自己的情感。
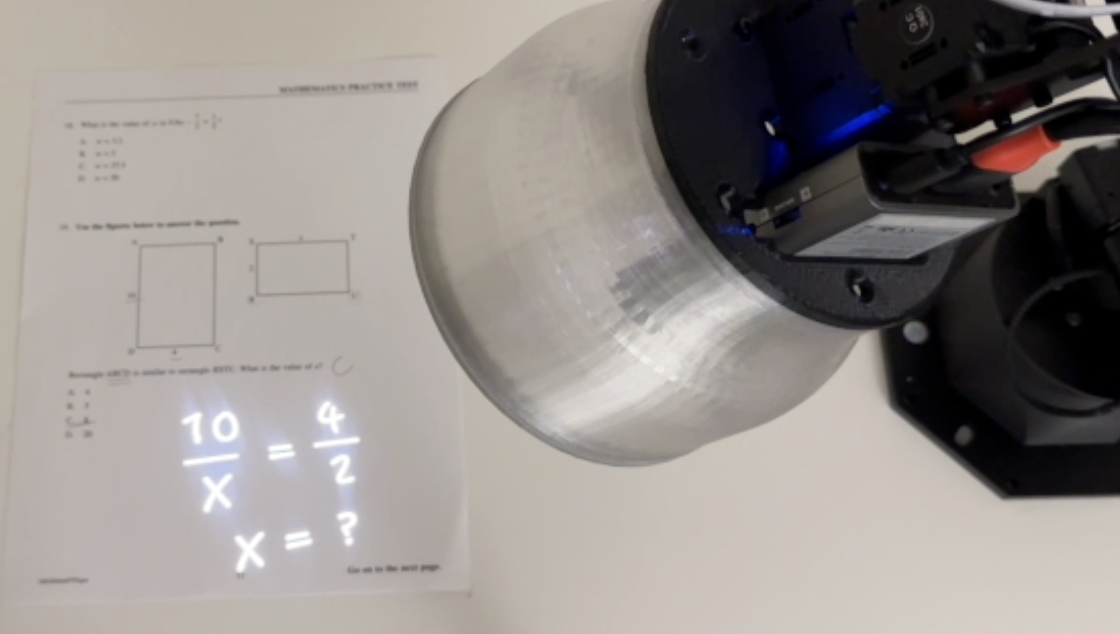
又如,它还具备投影功能,通过摄像头陪伴孩子写作业,并通过投影的图像和语音功能,为孩子辅导作业、批改作业,乃至一起画画本。
在你晚上口渴想喝水时,它还会打开灯,通过自己的照明轨迹告诉你水杯在哪里,喝完水你要把水杯放到桌上,它也会跟随你的水杯运动轨迹,给你提供更好的照明体验。

当你问它“今天天气怎么样”时,它会先看向窗外,然后告诉你今天的天气状况。

更为神奇的是,当你在桌前阅读时,它还会通过将水杯推向你面前,提醒你,你该喝水了。

从苹果机器学习研究团队公布的4分钟演示视频中来看,它已经不仅仅是一个桌面台灯,更像是一个活泼可爱的小精灵,更富有陪伴属性。
与此同时,我们发现,这次,苹果也在尽可能多得将大模型技术应用的机器人中,它甚至可以为你提供一些专业指导和建议。
例如,当你在维修一个设备却一直没有头绪时,你的台灯可以直接为通过它的投影仪投射出正确的设备修理教程。

这就是苹果近日公布的台灯机器人研究项目。
苹果押注家用机器人
苹果上一个和机器人稍微沾点边的产品,还是在WWDC 2017上发布的智能音箱HomePod,这一年,智能音箱百箱大战,一度被视为人工智能技术的绝佳载体,也被视为智能家居绝佳的入口级设备。
不过,当时的苹果依旧晚了一步,在亚马逊和谷歌占据美国智能音箱主导地位时,苹果的HomePod在上市后的第一年,2018年,仅仅在美国市场拿下了6%的市场份额。
这次押注机器人是苹果继放弃造车、加码Vision Pro后的又一个重大决策,据外媒透露,由Kevin Lynch领导的机器人团队于2025年8月成立,并在全球范围内招聘机器人领域专家。
据外媒Appleinsider的近日报道,苹果目前正在招聘更多机器人专家,旨在推进家用机器人领域的产品研发。
好文章,需要你的鼓励


西班牙病毒如何将谷歌带到马拉加
33年后,贝尔纳多·金特罗决定寻找改变他人生的那个人——创造马拉加病毒的匿名程序员。这个相对无害的病毒激发了金特罗对网络安全的热情,促使他创立了VirusTotal公司,该公司于2012年被谷歌收购。这次收购将谷歌的欧洲网络安全中心带到了马拉加,使这座西班牙城市转变为科技中心。通过深入研究病毒代码和媒体寻人,金特罗最终发现病毒创造者是已故的安东尼奥·恩里克·阿斯托尔加。

让AI记住房间每个角落:悉尼大学团队如何让视频生成拥有“空间记忆“
悉尼大学和微软研究院联合团队开发出名为Spatia的创新视频生成系统,通过维护3D点云"空间记忆"解决了AI视频生成中的长期一致性难题。该系统采用动静分离机制,将静态场景保存为持久记忆,同时生成动态内容,支持精确相机控制和交互式3D编辑,在多项基准测试中表现优异。

LangChain核心库曝出严重漏洞,AI智能体机密信息面临泄露风险
人工智能安全公司Cyata发现LangChain核心库存在严重漏洞"LangGrinch",CVE编号为2025-68664,CVSS评分达9.3分。该漏洞可导致攻击者窃取敏感机密信息,甚至可能升级为远程代码执行。LangChain核心库下载量约8.47亿次,是AI智能体生态系统的基础组件。漏洞源于序列化和反序列化注入问题,可通过提示注入触发。目前补丁已发布,建议立即更新至1.2.5或0.3.81版本。

马里兰大学突破性发现:AI推理过程终于有了“身体检查“——ThinkARM框架揭开大型语言模型思维奥秘
马里兰大学研究团队开发ThinkARM框架,首次系统分析AI推理过程。通过将思维分解为八种模式,发现AI存在三阶段推理节律,推理型与传统AI思维模式差异显著。研究揭示探索模式与正确性关联,不同效率优化方法对思维结构影响各异。这为AI系统诊断、改进提供新工具。
2025
02/11
18:43
分享
点赞

2025联想天禧AI生态伙伴大会:天禧AI一体多端,与开发者共建个人AI生态
西班牙病毒如何将谷歌带到马拉加
LangChain核心库曝出严重漏洞,AI智能体机密信息面临泄露风险
Mill如何与亚马逊和全食超市达成合作协议
TechCrunch创业大赛中的9家顶尖生物技术初创公司
2025年印度科技领域十大重要发展
中科大发布Live Avatar:AI数字人无限聊天不翻车
从软件定义汽车到AI驱动质控:Testin云测助力车机测试数智化价值落地
无需Linux即可运行自由开源软件
超越 SEO:AI 引擎优化如何改变在线可见性格局
新Mac必装应用:五款提升工作效率的神器推荐
DXC蒲公英计划:为神经多样性IT专业人士赋能
