
无人驾驶出租车的远程监控与安全辅助技术
随着特斯拉计划本周在德克萨斯州奥斯汀推出配备安全驾驶员的试点无人驾驶出租车服务(特斯拉员工坐在副驾驶座位上进行监督和干预),现在是回顾安全驾驶员历史以及其他用于帮助自动驾驶汽车解决"长尾"问题的技术的好时机。
制造一辆能够完美安全地处理每种可能道路情况的汽车是一个科幻目标——没有人知道如何实现这一点。因此,所有无人驾驶汽车都以某种方式依赖人类,从清洁和充电等简单任务到在做出不安全行为时进行干预。
移除安全驾驶员是将车辆从测试原型变为真正无人驾驶出租车的"重大步骤"。虽然还有许多其他步骤,但与车辆首次在没有人类监督和控制的情况下上路相比,这些都是小步骤。
最早的无人驾驶汽车相当原始且经常失效,被设置为人类驾驶员可以坐在驾驶员座位上随时抓住方向盘或踩踏板。这会立即断开自动驾驶系统,汽车变为手动驾驶。许多汽车还配备"大红按钮",这是一个紧急停止按钮,在抓住控制装置失败时使用。
除了DARPA大挑战等封闭赛道外,从第一天开始,所有无人驾驶汽车测试都是这样工作的。所有团队都希望有一天能够移除安全驾驶员,因为这是整个目标。它通常工作得很好。有了行为恰当的安全驾驶员,测试无人驾驶汽车具有很好的安全记录。
在早期,汽车通常配备两名工作人员,一名在方向盘后面,另一名有时被称为软件操作员,监控驾驶软件以确保其正确运行。安全驾驶员可以随时接管方向盘,并被告知如果感觉到任何异常情况时要这样做。
特斯拉在发布Autopilot和FSD时将事情提升到了新的水平。这些系统让普通未经培训的客户充当车辆的监督员。当特斯拉这样做时,人们非常怀疑依赖普通客户是否不安全,但实际上,它成功了。
除了驾驶员座位,一些车辆将安全操作员放在其他位置,如副驾驶座位。在没有控制装置的车辆中(如某些班车),员工可能只能访问紧急停止按钮,该按钮命令车辆停止并靠边停车。
令人惊讶的是,今天道路上有远程驾驶的汽车。德国公司Vay使用这种技术在拉斯维加斯为客户送车。其他几家公司也为远程驾驶构建了不同的工具。
远程驾驶通过公共数据网络完成,当然面临中断、丢包和有时长延迟。因此,它通常配备能够在没有远程输入的情况下执行安全基本操作的系统,在最坏情况下,如果通信变得太糟糕,它只会停下来。
远程监督实际上是将安全驾驶员变为远程的。汽车主要自动驾驶,但远程监督员始终在观看(通常使用一组屏幕或可能是VR头戴设备),如果他们看到需要接管的情况,会虚拟地"抓住方向盘"。
大多数公司都有连接到汽车并观察其行为的能力,即使在完全自主模式下也是如此。虽然公司拒绝对此发表评论,但当他们首次敢于在没有安全驾驶员的情况下派出汽车时,所有公司可能都这样做了。
所有公司都倾向于拥有远程辅助操作室。在那里,操作员可以帮助车辆在遇到困惑时解决问题。他们通常不能直接驾驶车辆,只能给出战略建议,如"掉头并采用这条新路线"或"在第二个路口左转",最常见的是"继续你当前的计划,没问题"。
为了使远程辅助规模化,你需要道路上的车辆数量比远程辅助操作员多得多,这样每辆车平均只需要在很小一部分时间内进行主动辅助。
当其他一切都失败时,大多数团队可以派遣人类开车营救车辆,通过手动驾驶或在最坏情况下拖车。对于没有控制装置的汽车,这些团队将配备插入式视频游戏风格控制器。
好文章,需要你的鼓励

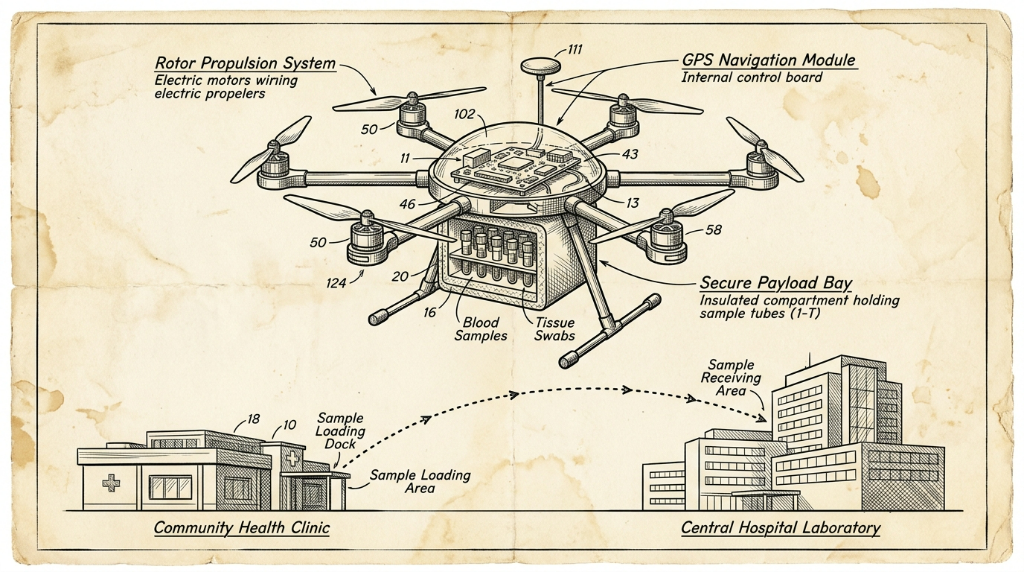
英国NHS无人机快递医疗样本服务正式落地伦敦
英国国家医疗服务(NHS)正将无人机纳入常规医疗物流体系。自今年2月起,无人机每天在雷恩斯公园和圣乔治医院之间运送血液等诊断样本,飞行仅需3分钟,比公路运输快约85%,且碳排放减少高达98%。目前已有逾2000名患者受益。NHS计划将该服务扩展至圣赫利尔、克罗伊登等多家医院,最终惠及约180万名患者。该网络由英国医疗初创公司Apian与谷歌旗下Wing合作运营。
Explyt团队打造的代码智能体评测新标准:光靠“通过/失败“根本不够用
AgentLens是Explyt公司联合俄罗斯学术机构开发的AI编程助手评测基准,通过分析完整人机交互轨迹而非仅看最终结果,从五个维度评估代码智能体的真实表现。
Aetina宣布支持英伟达Jetson T3000和T2000 AI模块
边缘AI计算厂商Aetina宣布,将在其DeviceEdge AIE-KT风冷系列和新款AIE-PT无风扇平台上支持英伟达全新Jetson T3000和T2000模块。T3000基于Blackwell GPU,最高提供865 FP4 TFLOPS算力,功耗70W;T2000则提供400 FP4 TFLOPS,面向视觉AI代理和自主移动机器人等场景。两款模块预计2027年第一季度上市,支持Nemotron、Cosmos 3等英伟达AI软件生态。
机器人的“触觉觉醒“:韩国梨花女子大学如何让小型AI模型在不忘记视觉的前提下学会“感受“材质
韩国梨花女子大学提出Splash框架,通过识别AI模型中的"休眠参数"并只在其中训练触觉能力,让小型多模态AI在学会感知材质触感的同时,完整保留原有视觉语言推理能力。
2025
06/23
10:14
分享
点赞

WAIC2026 现场直击:开普勒顶流人气王,麒麟系列火爆出圈
面壁智能将密度定律带入具身智能
龙磁科技拟投3.58亿元扩建越南永磁铁氧体基地
首创一层Scale-up网络256卡全互联,摩尔线程MTT C256超节点为万卡及十万卡级集群夯实底座
从高血压诊疗入手,北京安贞医院让医疗大模型走出聊天框
西门子肖松:以场景为牵引,推动工业AI从单点实效迈向生产力跃迁
打造Token极致性价比 新华三震撼亮相2026世界人工智能大会
机器人管家系统上线!傅利叶携多款康养陪伴新品方案亮相WAIC 2026
赛那德“ 自主作业机器人天团” 登陆 WAIC:iLoabot-X+模型双升级,秀出具身场景落地硬实力
西门子Eigen工程智能体中国首发首展,荣获2026 WAIC SAIL之星奖
NVIDIA Cosmos 推动物理 AI 前沿发展
PPIO亮相WAIC 2026:发布智能模型网关,打造面向Agent时代的智能Token工厂
特斯拉推迟无人出租车发布改用安全员模式
Waymo召回1200辆机器人出租车,因低速碰撞门和链
Aurora 扩展无人驾驶卡车业务,将新增夜间驾驶和新线路
Uber 与 Volkswagen 联手在美国推出自动驾驶电动微巴士 robotaxi 服务
Tesla 在 Austin 和湾区开始员工参与的 “FSD Supervised” 网约车测试
Parallel Systems 正在打造短途货运自动驾驶电动铁路系统
Amazon 旗下 Zoox 在洛杉矶启动自动驾驶出租车测试
卫星物联网公司 Myriota 扩展低轨卫星星座以支持物联网
Wayve CEO分享扩展自动驾驶技术的关键要素
英伟达和通用汽车合作开发自动驾驶汽车
