
NVIDIA Jetson将智能体AI带入物理世界
智能体AI正在走向现实。
在COMPUTEX展会上,NVIDIA宣布NVIDIA JetPack 7.2和NVIDIA NemoClaw正式支持Jetson平台。
JetPack 7.2带来了智能体AI技能、Yocto项目支持、NVIDIA Jetson Orin上的NVIDIA CUDA 13、Jetson AGX Orin 32GB模块的显著性能提升,以及NVIDIA Jetson Thor上的多实例GPU(MIG)支持。
此次发布恰逢GTC台北"Build-a-Claw"活动,将GTC圣何塞的热门动手实践活动带到了台湾这一全球顶尖技术中心之一。
此次发布将NVIDIA的智能体AI框架NemoClaw引入生产级Jetson技术栈,使智能体AI从服务器和工作站走向物理世界,覆盖机器人、检测和工业自动化等领域。
NVIDIA机器人与边缘计算副总裁Deepu Talla表示:"智能体AI已经到来,Jetson的可编程性和高性能使开发者能够在边缘端即时部署生产级物理AI智能体。借助专为智能体开发和工作流程构建的技能,开发者可以加速产品上市、降低总体拥有成本并实现规模化部署,这一切都基于一个内存优化平台。"
Jetson已是一个多代平台,涵盖Orin、Thor等系列,为机器人、自主系统、工业检测和医疗设备中的边缘AI提供支持。JetPack 7.2在此基础上持续演进,NemoClaw则进一步扩展了其能力边界。
本次发布涵盖三个层级:底层是JetPack 7.2,负责操作系统、计算和确定性性能;中间层是新增的智能体技能,用于自动化开发者任务;顶层则是NemoClaw。
JetPack 7.2为Jetson软件基础带来重大升级。基于Yocto的操作系统支持为工业客户提供了更精简、可定制性更强的Linux基础,这对内存受限的部署场景尤为重要。Jetson Orin上的CUDA 13将最新计算栈引入现有设备。Jetson Thor上的MIG加实时内核使开发者能够为确定性工作负载(如不能因无关AI推理而暂停的机器人感知系统)预留专用GPU资源。Jetson AGX Orin 32GB的AI算力也得到提升,达到241 TOPS,较原始规格提升20%。
中间层的智能体技能加速了Jetson系统的构建工作,现已涵盖Linux定制、内存优化、模型基准测试等开发者任务。这些技能基于NVIDIA文档和设计指南开发,可作为智能体可部署技能使用。最终效果是:原本需要数周完成的任务如今数天即可解决。
在顶层,NemoClaw只需一条命令即可部署到Jetson。这一组合将智能体AI落地于生产级机器人和视觉AI技术栈,加速工业系统的任务自动化。开发者还可借助NVIDIA Metropolis VSS蓝图技能进一步扩展,添加能够观察、理解并响应所见内容的视觉推理智能体。
Jetson平台已在机器人、工业自动化、无人机、医疗设备、农业机械、人形机器人系统等众多领域实现落地部署。
Solomon利用NVIDIA NemoClaw在人形机器人上协调AI智能体,将推理、感知、传感器融合、运动和操作整合到单一工作流程中。借助由NVIDIA开源基础模型驱动的主动感知技术,机器人能够理解任务、优化抓取定位并动态适应,从而在复杂环境中实现可靠的自主运行。
研华科技正在其自有制造设施中构建和部署基于智能体的工厂大脑,利用NVIDIA NemoClaw、NVIDIA Nemotron 3和NVIDIA Jetson Thor实现AI原生运营。该平台实现了机器人集群管理自动化、智能缺陷检测和自主决策,推动下一代工业运营发展。
Rebotnix为智慧城市打造具备智能体推理能力的摄像头,助力更快的城市级决策。
Spingence构建制造缺陷智能体,通过分析和知识推理识别根本原因并提出流程改进建议。
ANIWEAVE与Avalanche Computing合作,借助AI驱动的对话智能体将房地产空间转化为沉浸式3D看房体验。
SandStar利用NVIDIA Jetson Orin NX和NemoClaw,为AI自动售货机和智慧零售运营提供支持,覆盖30多个国家,融合AI视觉、大语言模型驱动的交互、标准操作规程监控和门店优化。通过实现近40%的内存优化,SandStar将设备从16GB迁移至8GB,在保持高性能的同时大幅降低了部署成本。
NoTraffic开发了AI驱动的智能交通管理系统,能够分析实时交通状况并动态优化信号灯运行。该公司通过静态编译和针对性内核裁剪优化了CUDA库开销,将内存使用量减少了29%,提升了效率并简化了感知栈,实现更快的实时推理。
GROOVE X(LOVOT陪伴机器人的制造商)正在Jetson模块上使用多种AI加速器,以分担CPU和GPU工作负载并减少内存占用。
Hexagon Robotics正在集成NVIDIA Jetson Thor,通过实时AI、高速传感器处理和多模态数据融合,为人形机器人赋予更强的安全性和自主能力。结合基于Yocto的操作系统定制以提升可复现性和安全性,这些人形机器人在制造、物流和建筑等高要求环境中运行更加可靠。
Zipline在其自主配送无人机中使用NVIDIA Jetson Orin NX,实现实时传感器融合、环境感知和安全导航,为全球用户提供快速的医疗、食品和零售配送服务。Zipline使用Yocto构建其定制操作系统,该系统专为高性能机载AI处理而设计,同时兼顾可靠性、效率和更低的内存占用。
1X(Neo人形机器人制造商)和Universal Robots正计划在其生产部署中采用基于Yocto的JetPack 7.2。
Balena、Konsulko Group、Neurealm、Peridio、RidgeRun和Wind River提供Linux发行版产品、工程服务和长期支持,帮助客户更快速地完成生产级Yocto部署。
AAEON、华硕、Avermedia、Connect Tech和YUAN已验证Yocto操作系统与其生产边缘计算系统的兼容性,以加速客户部署。
NemoClaw起步于数据中心,如今已运行于零售门店、工厂车间的人形机器人以及繁忙路口的交通系统中。物理AI智能体的时代正式开启。
开发者可访问Jetson软件页面,开启智能体AI之旅。
Q&A
Q1:NVIDIA JetPack 7.2带来了哪些主要更新?
A:JetPack 7.2带来了多项重要升级:新增基于Yocto的操作系统支持,为工业客户提供更精简可定制的Linux基础;引入CUDA 13支持Jetson Orin设备;在Jetson Thor上支持MIG加实时内核,可为确定性工作负载预留专用GPU资源;Jetson AGX Orin 32GB的AI算力提升至241 TOPS,较原规格提升约20%。此外还新增了智能体技能层,涵盖Linux定制、内存优化、模型基准测试等开发任务自动化能力,大幅缩短开发周期。
Q2:NemoClaw是什么?它和Jetson平台有什么关系?
A:NemoClaw是NVIDIA的智能体AI框架,原本运行于数据中心环境。通过此次更新,NemoClaw可通过一条命令直接部署到Jetson平台,将智能体AI能力延伸到边缘端的物理世界,包括机器人、工业自动化和智慧城市等场景。开发者还可结合NVIDIA Metropolis VSS蓝图技能,添加具备视觉推理能力的智能体,实现观察、理解和响应现实环境的完整闭环。
Q3:目前有哪些企业已经在用Jetson平台做实际部署?
A:已有多家企业基于Jetson平台实现了落地应用。Solomon用NemoClaw协调人形机器人上的AI智能体;研华科技正在自有工厂部署智能体工厂大脑;SandStar利用Jetson Orin NX驱动覆盖30多个国家的AI智能零售系统,并将设备内存从16GB降至8GB;NoTraffic开发了智能交通管理系统,内存使用量减少29%;Zipline则在自主配送无人机中使用Jetson Orin NX实现实时导航与传感器融合。
好文章,需要你的鼓励

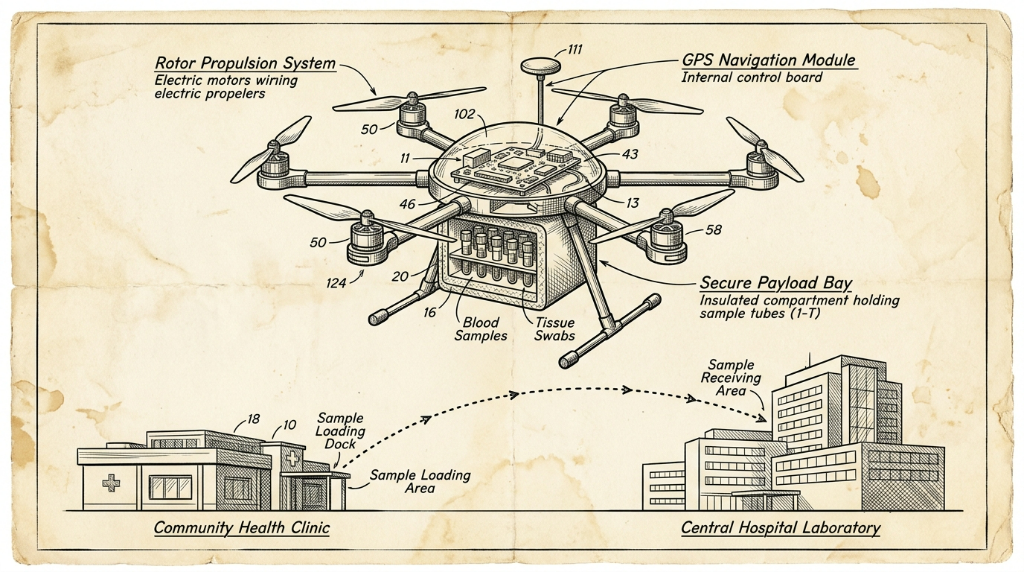
英国NHS无人机快递医疗样本服务正式落地伦敦
英国国家医疗服务(NHS)正将无人机纳入常规医疗物流体系。自今年2月起,无人机每天在雷恩斯公园和圣乔治医院之间运送血液等诊断样本,飞行仅需3分钟,比公路运输快约85%,且碳排放减少高达98%。目前已有逾2000名患者受益。NHS计划将该服务扩展至圣赫利尔、克罗伊登等多家医院,最终惠及约180万名患者。该网络由英国医疗初创公司Apian与谷歌旗下Wing合作运营。
Explyt团队打造的代码智能体评测新标准:光靠“通过/失败“根本不够用
AgentLens是Explyt公司联合俄罗斯学术机构开发的AI编程助手评测基准,通过分析完整人机交互轨迹而非仅看最终结果,从五个维度评估代码智能体的真实表现。
Aetina宣布支持英伟达Jetson T3000和T2000 AI模块
边缘AI计算厂商Aetina宣布,将在其DeviceEdge AIE-KT风冷系列和新款AIE-PT无风扇平台上支持英伟达全新Jetson T3000和T2000模块。T3000基于Blackwell GPU,最高提供865 FP4 TFLOPS算力,功耗70W;T2000则提供400 FP4 TFLOPS,面向视觉AI代理和自主移动机器人等场景。两款模块预计2027年第一季度上市,支持Nemotron、Cosmos 3等英伟达AI软件生态。
机器人的“触觉觉醒“:韩国梨花女子大学如何让小型AI模型在不忘记视觉的前提下学会“感受“材质
韩国梨花女子大学提出Splash框架,通过识别AI模型中的"休眠参数"并只在其中训练触觉能力,让小型多模态AI在学会感知材质触感的同时,完整保留原有视觉语言推理能力。
2026
06/02
18:18
分享
点赞

WAIC2026 现场直击:开普勒顶流人气王,麒麟系列火爆出圈
面壁智能将密度定律带入具身智能
龙磁科技拟投3.58亿元扩建越南永磁铁氧体基地
首创一层Scale-up网络256卡全互联,摩尔线程MTT C256超节点为万卡及十万卡级集群夯实底座
从高血压诊疗入手,北京安贞医院让医疗大模型走出聊天框
西门子肖松:以场景为牵引,推动工业AI从单点实效迈向生产力跃迁
打造Token极致性价比 新华三震撼亮相2026世界人工智能大会
机器人管家系统上线!傅利叶携多款康养陪伴新品方案亮相WAIC 2026
赛那德“ 自主作业机器人天团” 登陆 WAIC:iLoabot-X+模型双升级,秀出具身场景落地硬实力
西门子Eigen工程智能体中国首发首展,荣获2026 WAIC SAIL之星奖
NVIDIA Cosmos 推动物理 AI 前沿发展
PPIO亮相WAIC 2026:发布智能模型网关,打造面向Agent时代的智能Token工厂
HPE因AI服务器热销业绩大幅超预期,股价飙升逾25%
Vision Components亮相CVPR:搭载边缘AI处理器的VC EvoCam与高达2450万像素的MIPI新相机
Anthropic启动IPO进程,AI企业融资热潮冲击华尔街
Alphabet计划出售800亿美元股票,用于持续扩建AI基础设施
英特尔新款AI芯片将比英伟达、AMD产品更省钱更易散热
苹果智能眼镜据报道推迟至2027年底发布
DuckDuckGo推出"无AI"搜索浏览器扩展,流量激增近三成
著名数学家Subhash Khot加盟IBM Research,强化量子计算理论研究
Controller for HomeKit应用新增AI功能:「说出你想要的」
ChatGPT应用新增隐藏手势等多项实用功能
