
Meta研究人员做出AI新尝试:机器人无需地图或训练实现自主导航
Meta Platforms公司人工智能部门日前表示,他们正在教AI模型如何在少量训练数据支持下学会在物理世界中行走,目前已经取得了快速进展。
这项研究能够显著缩短AI模型获得视觉导航能力的时间。以前,实现这类目标要需要利用大量数据集配合重复“强化学习”才能实现。
Meta AI研究人员表示,这项关于AI视觉导航的探索将给虚拟世界带来重大影响。而项目的基本思路并不复杂:帮助AI像人类那样,单纯通过观察和探索实现在物理空间导航。
Meta AI部门解释道,“比如,如果要让AR眼镜指引我们找到钥匙,就必须想办法帮助AI理解陌生的、不断变化的环境布局。毕竟这是非常细化的小需求,不可能永远依赖于极占算力资源的高精度预置地图。人类不需要了解咖啡桌的确切位置或长度就能不产生任何碰撞、轻松绕着桌角走动。”
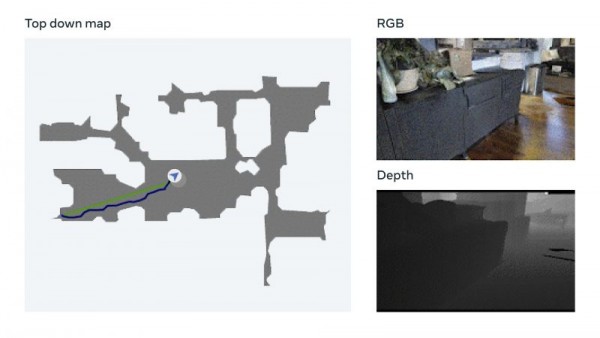
为此,Meta决定将精力集中在“具身AI”身上,即通过3D模拟中的交互机制训练AI系统。在这一领域,Meta表示已经建立起一套值得期待的“点目标导航模型”,无需任何地图或GPS传感器即可在新环境中导航。
该模型使用一种名为视觉测量的技术,允许AI根据视觉输入跟踪自身当前位置。Meta表示,这项数据增强技术能够快速训练出有效的神经模型,且无需人工数据注释。Meta还提到,他们已经在自家Habitat 2.0具身AI训练平台(利用Realistic PointNav基准任务运行虚拟空间模拟)上完成了测试,成功率达到94%。
Meta方面解释道,“虽然我们的方法还没有完全解决数据集中的所有场景,但这项研究已经初步证明,现实环境的导航能力不一定需要显式映射来实现。”
为了在不依赖地图的情况下进一步完善AI导航训练,Meta建立了一套名为Habitat-Web的训练数据集,其中包含10万多种由人类演示的不同对象-目标导航方法。通过运行在网络浏览器上的Habitat模拟器就能顺利接入Amazon.com的Mechanical Turk服务,用户能够以远程方式安全操作虚拟机器人。Meta表示,由此产生的数据将作为训练素材,帮助AI代理获得“最先进的结果”。扫视房间了解整体空间特点、检查角落是否有障碍物等,都是值得AI向人类学习的高效对象搜索行为。
此外,Meta AI团队还开发出所谓“即插即用”模块化方法,可以通过一套独特的“零样本体验学习框架”帮助机器人在多种语义导航任务和目标模式中实现泛化。通过这种方式,AI代理在缺少资源密集型地图和训练的前提下仍可获得基本导航技能,无需额外调整即可在3D环境中执行不同任务。
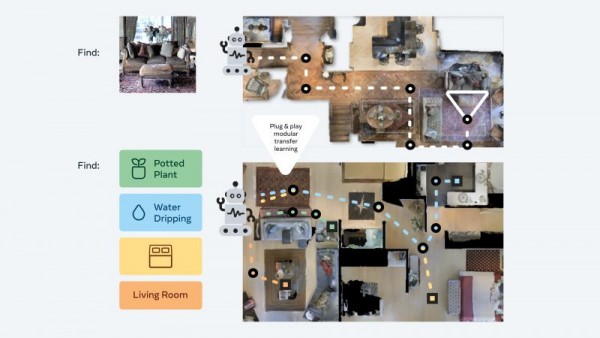
Meta公司解释道,这些代理在训练中会不断搜索图像目标。它们会收到一张在环境中随机位置拍摄的照片,然后通过自主导航尝试找到拍摄点位。Meta研究人员们表示,“我们的方法将训练数据削减至1/12.5,成功率则比最新的迁移学习技术还高出14%。”
Constellation Research公司分析师Holger Mueller在采访中表示,Meta的这项最新进展有望在其元宇宙发展计划中发挥关键作用。他认为,如果未来虚拟世界能够成为常态,那AI必须有能力理解这个新空间,而且理解的成本还不能太高。
Mueller补充道,“AI理解物理世界的能力需要由基于软件的方法获得扩展。Meta目前走的就是这条路,而且在具身AI方面取得了进步,开发出无需训练即可自主理解周边环境的软件。我很期待看到这方面成果在实践层面的早期应用。”
这些现实用例可能已经离我们不远了。Meta公司表示,下一步计划就是把这些成果从导航推进到移动操作,开发出能够执行特定任务的AI代理(比如识别出钱包并将其交还给主人)。
好文章,需要你的鼓励


OpenAI在版权诉讼中疑因隐瞒证据遭遇重大危机
OpenAI在与多家新闻机构的版权诉讼中陷入困境。以《纽约时报》为首的原告指控OpenAI在长达两年时间里向法庭撒谎,刻意隐瞒其已对ChatGPT日志进行大规模搜索的事实。据悉,OpenAI实际上已拥有包含1000万和7800万条记录的日志样本,并曾用于研究版权内容过滤器,却对外声称无法进行此类搜索。原告据此提出制裁动议,要求法院追责。OpenAI则否认相关指控,坚称其立场基于合理使用原则。

当AI学会“挑剔“:斯坦福与伯克利联手打造的智能验证框架,让AI自己检验自己的答案
斯坦福与UC伯克利提出LLM-as-a-Verifier框架,通过提取AI模型内部概率分布生成连续评分,在代码、机器人、医疗领域均达到最优性能,且无需额外训练。

外科医生远程操控人形机器人,完成全球首例活猪手术
美国加州大学圣地亚哥分校研究团队在《自然》期刊发表研究成果:外科医生通过远程操控宇树G1仿人机器人,成功完成两例活体猪胆囊切除手术,创下全球首例。与造价数十至数百万美元的达芬奇手术机器人相比,仿人机器人成本更低、体积更小,未来有望部署于农村、战地乃至太空等资源匮乏的医疗场景。但目前仍存在需频繁重新校准、机械臂活动范围受限等挑战。

字节跳动Seed团队发现:AI智能体学习新任务的速度,正以每三个月翻倍的惊人节奏增长
字节跳动Seed团队发现AI智能体在真实环境中学习的进步曲线精确遵循对数S形规律,R?达0.998,且前沿模型的学习速度每三个月翻倍。
2022
06/17
17:41
分享
点赞

OpenAI在版权诉讼中疑因隐瞒证据遭遇重大危机
外科医生远程操控人形机器人,完成全球首例活猪手术
OpenAI发布ChatGPT Work:AI助手可连续工作数小时
欧盟向Meta施压:关闭自动播放和无限滚动,否则面临巨额罚款
世界模型的潜力与局限:它真的能模拟一切吗?
苹果起诉OpenAI:前员工利用系统漏洞窃取商业机密
如何利用开源AI智能体实现工作流程自动化
Cloudzy 云服务评测:VPS 性能与体验全面解析
这款PCIe插卡内置38核至强处理器与64GB内存,堪称完整服务器
是否该为企业招募数字员工?AI 智能体团队搭建全指南
AI赋能自主机器人:从工厂走向家庭的未来图景
数据中心能源需求威胁特朗普"美国制造"计划
