
极智AI | 解读Hamilton-Jacobi-Bellman (HJB)方程
HJB 方程的推导基于动态规划原理,其核心思想是将整个时间段的优化问题分解为无数个微小时间间隔内的优化问题。


这个示例代码的实现
下面以 Python 实现一个简单的 HJB 方程的数值求解,使用有限差分法求解上述示例中的HJB方程。
import numpy as npimport matplotlib.pyplot as plt# 参数设置T = 1.0 # 终止时间Nx = 100 # 状态变量离散化数量Nt = 1000 # 时间离散化数量x_max = 2.0 # 状态变量范围 [-x_max, x_max]dt = T / Ntdx = 2 * x_max / Nxx = np.linspace(-x_max, x_max, Nx+1)t = np.linspace(T, 0, Nt+1) # 时间从T到0逆向# 初始化价值函数 V(x, T) = 0.5 * x^2V = 0.5 * x**2# 使用向后时间步进for n in range(Nt):# 计算空间导数 dV/dxdVdx = np.zeros_like(V)dVdx[1:-1] = (V[2:] - V[:-2]) / (2 * dx)# 边界条件 (Neumann边界条件 dV/dx=0)dVdx[0] = (V[1] - V[0]) / dxdVdx[-1] = (V[-1] - V[-2]) / dx# 更新价值函数 V_t + 0.5*(V_x)^2 = 0V_new = V - dt * 0.5 * (dVdx)**2V = V_new.copy()# 可视化结果plt.figure(figsize=(8,6))plt.plot(x, V, label='价值函数 $V(x, 0)$')plt.xlabel('状态变量 $x$')plt.ylabel('价值函数 $V$')plt.title('HJB 方程数值解')plt.legend()plt.grid()plt.show()# 计算最优控制策略 u*u_star = -dVdxplt.figure(figsize=(8,6))plt.plot(x, u_star, label='最优控制 $u^*$')plt.xlabel('状态变量 $x$')plt.ylabel('控制变量 $u^*$')plt.title('最优控制策略')plt.legend()plt.grid()plt.show()
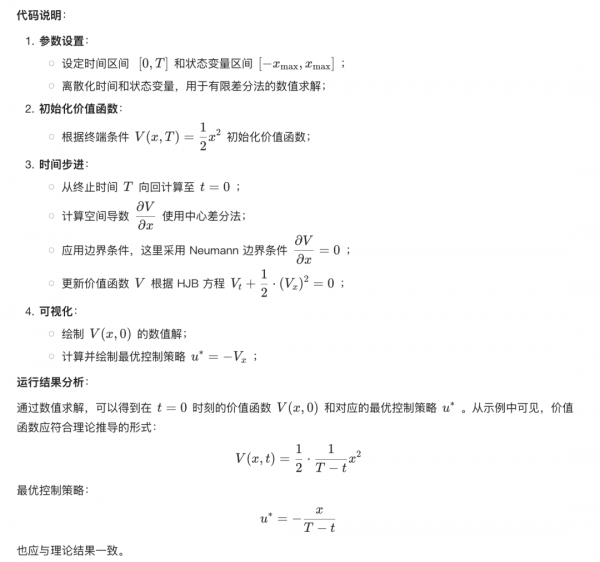
HJB 方程是解决动态优化和最优控制问题的强大工具。通过动态规划原理,HJB 方程将复杂的优化问题转化为偏微分方程的求解问题。尽管在高维情况下数值求解 HJB 方程可能面临维度灾难,但在低维或具有特定结构的问题中,HJB 方程提供了清晰的解析或数值解法。
好文章,需要你的鼓励


智能体即服务将重塑软件行业和企业结构
今年是AI智能体的爆发年。聊天机器人正演进为能代表用户执行任务的自主智能体,企业持续投资智能体平台。调研显示,超半数高管表示其组织已在使用AI智能体,88%在智能体上投入过半AI预算的公司已从至少一个用例中获得投资回报。Gartner预测,到2026年40%的企业软件应用将包含智能体AI,2035年智能体AI可能驱动约30%的企业应用软件收入。企业开始将AI智能体视为员工,建立招聘培训体系。

NVIDIA联手多所高校推出SpaceTools:AI机器人有了“火眼金睛“和“妙手回春“
NVIDIA联合多所高校开发的SpaceTools系统通过双重交互强化学习方法,让AI学会协调使用多种视觉工具进行复杂空间推理。该系统在空间理解基准测试中达到最先进性能,并在真实机器人操作中实现86%成功率,代表了AI从单一功能向工具协调专家的重要转变,为未来更智能实用的AI助手奠定基础。

谷歌AI模型在伪造手机拍照方面变得异常精准
谷歌的Nano Banana Pro AI模型生成的图像逼真度令人震惊,其关键在于完美模拟了手机相机的拍照特征。这些AI生成的图像具备手机拍照的典型特点:明亮平坦的曝光、较大的景深范围、略显粗糙的细节处理,甚至包含噪点。该模型还能自动添加符合情境的细节元素,如房产照片的水印等,使图像更加真实可信。这种技术进步意味着辨别AI生成内容变得更加困难。

机器人学会“三思而后行“:中科院团队让AI机器人告别行动失误
这项研究解决了现代智能机器人面临的"行动不稳定"问题,开发出名为TACO的决策优化系统。该系统让机器人在执行任务前生成多个候选方案,然后通过伪计数估计器选择最可靠的行动,就像为机器人配备智能顾问。实验显示,真实环境中机器人成功率平均提升16%,且系统可即插即用无需重新训练,为机器人智能化发展提供了新思路。

