
傅利叶正式开源全尺寸人形机器人数据集Fourier ActionNet,并发布全球首个全流程工具链
3月17日,傅利叶正式开源全尺寸人形机器人数据集Fourier ActionNet,并发布全球首个全流程工具链。首批上线超3万条高质量真机训练数据,包含多种自由度灵巧手的训练数据及专门针对手部任务的模仿学习数据,面向全球开发者及科研机构开源共享,提供从数据采集、训练、部署的一站式解决方案。
数据高质量,提升训练有效性
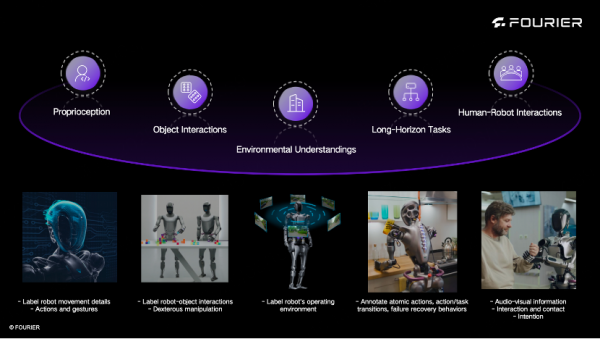
高质量机器人动作数据是具身智能发展的核心驱动力。然而真实场景下的机器人动作数据长期面临采集成本高、标注精度不足等问题,制约着行业进步。Fourier ActionNet数据集囊括傅利叶GRx系列所有机型的各类任务训练,完整记录机器人在真实环境中的任务执行数据,涵盖了对常用工具、家居用品、食物等多种物体的精确取放、倾倒等操作,以及在不同环境条件下实现泛化执行。
- 多模态+高质量+万级体量:万级真机训练数据,包含专门针对手部任务的模仿学习数据,适配多自由度灵巧手任务;

- VLM标注+人工核验:所有数据均采用视觉语言模型(VLM)进行自动标注,并通过人工二次核验,确保数据精度与准确性。
全球首个全流程工具链,降低研发门槛
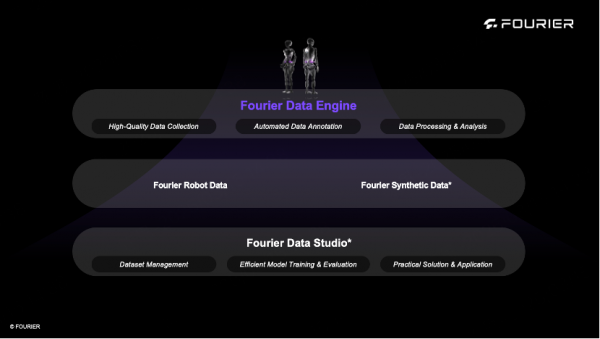
除了数据集的开源以外,傅利叶同步开放了全球首个包含采集算法、训练算法以及数据部署算法的全流程工具链,最大程度上与全球开发者共享研究成果。开源的训练框架(如DP、ACT、iDP3)和部署工具,进一步降低了人形机器人技术研发门槛。
- 自带数据质量评估:基于扩散策略(DP)、Transformer动作分块策略(ACT)及改进3D扩散策略(iDP3)对数据集进行系统性验证,在GRx全系列机型中均可稳定执行开柜门、抓取柠檬、倾倒豆子等高难度任务;
- 配套开发工具支持:同步开源基于LeRobot生态的DP、ACT、iDP3等主流训练框架和部署框架,提供从数据管理到算法部署的全流程支持。
共建开源生态,推动技术共享
目前,傅利叶已与国内外20多家顶尖科研院校及行业领军企业开展合作,基于GRx人形机器人平台在强化学习、模仿学习、VLM大模型、感知系统等研究领域产出多项突破性成果。此次数据集开源标志着傅利叶从技术攻坚向生态共建的战略升级,未来还将持续开放更多覆盖全身运控、多任务协同的进阶数据模块。
傅利叶始终致力于推动人形机器人开源生态建设,助力全球机器人技术共享与创新。我们诚邀所有对人形机器人研究感兴趣的开发者和科研伙伴加入这一开源浪潮,共同参与数据贡献与算法优化,迎接机器人技术赋能未来的无限可能。
好文章,需要你的鼓励


脑部植入物助瘫痪男子重获进食与饮水能力
一名因游泳事故导致胸部以下瘫痪的男子,通过脑植入芯片重新获得了自主进食和饮水的能力。研究人员为其安装了脑机接口,不仅帮助他重新活动手臂,还通过信号反馈重建了触觉感知。经过35周训练,其右臂力量提升86%,左臂提升62%。更令人惊喜的是,该技术似乎部分重塑了其神经系统,即使在系统关闭后,部分手部功能和感觉仍得以保留。

当AI变成“规则厨师“:奥地利与维也纳工业大学的研究团队如何让机器自动编写人类可读的“行事准则“
KR Labs与维也纳工业大学提出RuleChef框架,利用大型语言模型在学习阶段自动生成可读规则,推断时仅运行规则,兼顾透明性与高效性,在命名实体识别和意图分类任务上验证了有效性。

能源公司IPO融资创21世纪新高,押注AI基础设施热潮
受AI数据中心能源需求激增推动,能源企业IPO融资规模创本世纪新高。今年上半年,能源企业IPO融资达126亿美元,为1999年互联网泡沫顶峰以来最高水平,远超2025年全年的43亿美元。典型AI数据中心年均耗电约87.6万兆瓦时,美国电力需求预计在2026至2035年间增长39%。投资者正从芯片股逐步转向核能、地热等能源基础设施企业,看中其相对较低的市盈率(18倍,远低于科技股的40倍)。

腾讯混元推出“又快又强“的轻量级文字识别大模型HunyuanOCR-1.5
腾讯混元联合中科院与南开大学推出的HunyuanOCR-1.5,通过DFlash推测解码实现最高6.37倍推理加速,并用智能体数据构建框架显著增强古文字、低资源语言、多图问答等长尾OCR能力。
2025
03/17
11:21
分享
点赞

脑部植入物助瘫痪男子重获进食与饮水能力
能源公司IPO融资创21世纪新高,押注AI基础设施热潮
Apple Intelligence获中国监管批准,携手阿里巴巴与百度正式进入中国市场
Moonshot即将发布的Kimi K3有望赶超Anthropic Opus 4.8
OpenAI 为何开始卖 ChatGPT 品牌篮球?
DoorDash推出命令行工具,开发者可借助AI智能体直接下单
Google AI模式新增应用集成功能,支持Instacart等多款常用应用
Beehiiv推出社区互动功能并上线AI写作助手
英国警方:两名黑客被捕重创知名黑客组织"散落蜘蛛"
谷歌将NotebookLM更名为Gemini Notebook,强化生态系统整合
NASA阿尔忒弥斯计划经验如何应用于AI基础设施规划
如何禁止AI聊天机器人收集你的数据用于模型训练
魔法原子人形机器人走出“练兵场”
魔法原子举办2025场景战略发布会 官宣“千景共创计划”落地1000个应用场景
“2025世界机器人大赛-首届具身智能机器人运动会”新闻发布会在无锡召开
从“解题答疑”到“培养思维”,夸克“AI解题大师”定义AI产品新价值
傅利叶正式开源全尺寸人形机器人数据集Fourier ActionNet,并发布全球首个全流程工具链
《AI启示录》:当ERP长出AI神经,胜负手在于业务扎根
奢饰品行业的一个麻烦:这家法国公司想用AI来解决
北沟村的幸福蝶变:一场时间与技术的乡村交响
国产大模型崛起!ERP国产替代破局时刻到来!
DeepSeek之后,中国人形机器人以“群体智能”再次掀起技术浪潮
