
具身智能的算力需求,英特尔的解题思路 原创

作者| 金旺
栏目| 机器人新纪元
自2024年5月深入具身智能领域后,英特尔走访了近20家人形机器人企业,他们发现,在这个市场中,无论是初创团队,还是老牌自动控制或机器人团队,都在积极发力具身智能。
“这是一个双向积极投入的行业,”英特尔内部调研团队当时得出如是结论。
作为具身智能的终极形态,当时国内人形机器人产业随着全球人形机器人热潮得到了空前发展,人形机器人政策相继推出,人形机器人初创团队不断涌现。
来自GGII统计数据显示,2024年国内人形机器人销量为2400台,这个数据到2030年预计将达到16.2万台。
如果将这一数据放到与当前产业结合度更高的具身智能领域来看,国内十万量级、乃至百万量级的机器人都在经历着一场具身智能变革。
01 具身智能≠人形机器人
什么是具身智能?
艾伦·图灵在上世纪五十年代就曾提到,”具身智能是通过与环境交互获得知识并泛化应用能力。“英伟达创始人黄仁勋则指出,”具身智能是能够感知、推理并与物理世界互动的智能系统。“
不难发现,具身智能不仅仅是指人形机器人,而是有着更广泛的定义。
浙江人形机器人创新中心首席科学家、浙江大学求是特聘教授熊蓉在近日的2025英特尔具身智能解决方案推介会上就指出,“人形机器人代表的是一种通用形态,具身智能代表的是一种通用的行为智能,二者结合能实现取代专用机器人的多功能机器人,有更广阔的应用市场。”

不过,在英特尔的前期调研中,他们发现,短期内,具身智能和人形机器人的发展还难以实现洗碗、叠衣服、收拾房间、照顾老人等大家都很期待的生活化功能。
具身智能和人形机器人的发展将会有明显的阶段划分:
首先会在工业领域落地发展,例如特斯拉计划将机器人率先在工厂中落地应用,国内具身智能团队同样主要集中在推动具身智能机器人在制造业应用落地。
未来在在制造业得到验证后,具身智能和人形机器人将会进一步推向服务行业,最终才是进入大众生活场景。
这是具身智能和人形机器人的应用路径,具体到现阶段具身智能产业化探索时,率先推动具身智能应用落地的制造业企业在梳理工厂中遇到的问题、找出需要投入大量人力并尝试通过具身智能进行改造时发现,他们需要的机器人的形态不一定通过双腿行走的人形。
英特尔技术专家根据实际调研结果解释称,“工厂中有些固定工位面临操作复杂、灵活度高的任务难以用传统方式解决,有些场景则需增加移动能力来更好地落地应用,我们认为具身智能不等于人形机器人。”
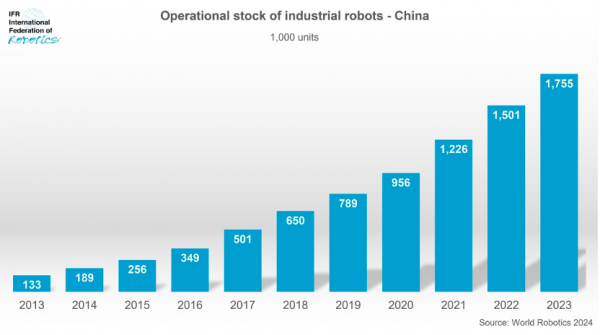
就制造业而言,据IFR统计数据显示,截至2023年底,中国工业机器人保有量达175.5万台,2023年装机量达到27.6万台,占全球装机量高达51%。
其中,机械臂和AGV/AMR应用尤为成熟,2024年国内新增机械臂29.4万台,新增AGV/AMR 19.3万台,这些机器人的质量和精度都已经很不错,但智能性有待进一步提升。
这样的需求同样是具身智能在制造业场景落地中的实际应用需求,不过,要满足具身智能的广泛应用需求,依然面临着诸多难题。
02 具身智能需要怎样的算力?
过去三十年里,随着中国制造业的快速发展,机器人,尤其是工业机器人在国内得到了充分的应用和发展,而作为自动化领域的集大成者,机器人一直在追求智能化。
由大模型带来的具身智能技术突破,为机器人带来进一步智能化的可能。
熊蓉指出,“传统机器人研究会把传感器获取的关键驱动执行过程拆解为一系列问题,并对每个问题进行建模,寻找合适的数学方法求解,最优化理论、概率推理等方法在其中发挥了重要作用。如今的具身智能是由专家建模求解转为数据驱动学习训练,由模块解耦分离转为感控一体端到端。”

大模型的技术发展,VLA端到端模型的持续研究,让感控一体端到端、大小脑融合成了具身智能机器人如今的一大技术发展趋势。
这样的技术发展趋势,又将为机器人技术研究和产业应用带来怎样的好处呢?
在接受媒体采访时,熊蓉进一步指出,“现在的小脑不再只是一个执行的控制,我们希望它具备像视觉伺服、视力伺服等能力,能够对作业对象形成控制。如果大小脑分开的话,一些传感器基于大脑控制,下传就会出现信息过大,不仅对网络带宽提出了很高的要求,也会带来延时问题,因而大小脑在硬件上的分离使我们很难做多种传感器融合,大小脑融合很好地解决了这些问题。”
然而,端到端系统、大小脑融合对算力同样提出了“融合”需求。
具身智能现阶段主流计算方案中,通常是以英特尔酷睿、凌动系列芯片进行小脑控制,以主流GPU芯片进行大脑控制,这样的大小脑双系统架构解决了具身智能专用算力问题,但也带来了硬件成本高、功耗与尺寸优化空间有限、网络通信延时不可控、软硬件研发成本上升等问题。
如何为具身智能机器人定制一个大小脑融合的专用计算解决方案,这时就显得尤为关键。
近日,英特尔正式对外发布了其具身智能大小脑融合方案。
早在2023年12月,英特尔正式对外发布第一代酷睿Ultra处理器,和英特尔以往发布的处理器不同的是,英特尔酷睿Ultra系列处理器不再仅仅是一颗CPU,而是一颗集成了CPU、GPU,以及低功耗、高性能的NPU的处理器。
这样的计算架构不仅让英特尔开启了AI PC时代,也为其在具身智能领域应用奠定了基础。
据英特尔中国网络与边缘技术与产品总监王景佳在发布会上透露,“我们今天推出的英特尔酷睿Ultra 200H系列处理器方案总AI算力已经达到96TOPS,而今年下半年即将发布的基于18A制程的下一代英特尔Panther Lake总算力将超过180TOPS。”

在基于英特尔酷睿Ultra 200H系列处理器的具身智能解决方案中,CPU支持具身智能方案进行复杂的运动控制,英特尔锐炫GPU用于具身智能处理环境感知、任务识别、任务规划、大语言模型、视觉语言模型和端到端模型等复杂任务,NPU则用于承载语音识别、实时视觉处理、传感器数据分析等需长时间运行的AI任务。
具体到实际应用场景中,熊蓉指出,“我们发现,在训练阶段,机器人系统对GPU的性能有一定要求,但在实际的探索和推理过程中,对CPU的性能要求更高,这也是我们为什么会采用CPU+GPU方案的原因。”
03 机器人的具身智能升级路径
从本田的ASIMO、波士顿动力的Atlas,到特斯拉的Optimus、宇树的H1,人形机器人进入大众视野已有二十多年。
在这二十多年里,英特尔技术专家认为,机器人经历了工业自动化、大模型、端到端模型三个阶段,在这三个阶段中,分别对算力提出了不同需求:

工业自动化阶段,机器人依赖传统计算机视觉、3D点云计算或深度学习网络来获取视觉信息,利用3D SLAM技术实现定位导航,并通过Moveit等运动轨迹规划库实现双臂控制。全身平衡和步态控制则依赖于WBC、MPC等传统控制算法,实时控制和更高频率的电机控制计算仍然是关键。
大模型阶段,大语言模型和视觉大模型增强了具身智能的泛化能力,大语言模型可以直接和机器人交互,实现任务编排,视觉大模型则通过视觉泛化能力提升了机器人对环境的理解能力,并为机器人操作提供关于未知物体的辅助信息。
端到端模型阶段,从去年下半年至今,学术界和产业界对端到端模型的研发投入了大量资源。此前大模型体现出的泛化能力主要集中在语言和视觉层面,而要真正实现机器人操作能力的泛化,需要将运动维度的数据纳入训练数据集中,从而训练出一个统一的大模型。
英特尔技术专家认为,工业自动化、大模型、端到端三个阶段并不是互相替代的关系,不同架构面对不同应用场景和负载需求时有着自身优势和性价比。
就具身智能落地应用而言,英特尔也针对性提出两种解决方案:
针对以大量运动控制为主的工业机器人或具身智能机器人本体,原本只用到了英特尔酷睿或凌动实现运动控制的机器人,用户可以将传统的英特尔酷睿处理器更新为英特尔酷睿Ultra处理器,将原有工作负载直接部署到酷睿Ultra CPU上,同时基于GPU、NPU将大语言模型、视觉模型,乃至端到端VLA模型引入,从而将传统工业机器人提升为具有交互能力、任务生成能力,甚至操作泛化能力的具身智能机器人。
针对现在采用双系统架构的机器人,可以将原有CPU升级为英特尔酷睿UItra,并借助英特尔工具将AI负载迁移到iGPU上,从而实现一体化具身智能解决方案。

与此同时,在本次发布会上,信步科技还推出了搭载英特尔酷睿Ultra 200系列处理器和英特尔锐炫B570显卡的具身智能硬件开发平台HB03。
据信步科技副总经理叶志辉介绍,“信步具身智能硬件开发平台HB03采用便于开发定制的模块化设计,有带显卡和不带显卡两个型号,带显卡版本机身厚度为78mm,算力高达300TOPS。”
此外,浙江人形机器人创新中心打造的“领航者2号NAVIAI”人形机器人,同样基于英特尔酷睿处理器,实现了可泛化高精准视觉伺服、多行为联合学习的长序列行为规划、视力融合的操作行为学习等技术突破。
这些技术突破也将推动具身智能,乃至人形机器人在工业场景落地应用
好文章,需要你的鼓励



Allen AI团队推出SAGE:首个能像人类一样“想看多长就看多长“的智能视频分析系统
Allen AI研究所联合多家顶尖机构推出SAGE智能视频分析系统,首次实现类人化的"任意时长推理"能力。该系统能根据问题复杂程度灵活调整分析策略,配备六种智能工具进行协同分析,在处理10分钟以上视频时准确率提升8.2%。研究团队创建了包含1744个真实娱乐视频问题的SAGE-Bench评估平台,并采用创新的AI生成训练数据方法,为视频AI技术的实际应用开辟了新路径。

联想推出DE6600系列:更智能的存储解决方案
联想推出新一代NVMe存储解决方案DE6600系列,包含全闪存DE6600F和混合存储DE6600H两款型号。该系列产品延迟低于100微秒,支持多种连接协议,2U机架可容纳24块NVMe驱动器。容量可从367TB扩展至1.798PiB全闪存或7.741PiB混合配置,适用于AI、高性能计算、实时分析等场景,并配备双活控制器和XClarity统一管理平台。

AI视觉模型真的能看懂长篇文档吗?中科院团队首次揭开视觉文本压缩的真相
中科院团队首次系统评估了AI视觉模型在文本压缩环境下的理解能力,发现虽然AI能准确识别压缩图像中的文字,但在理解深层含义、建立关联推理方面表现不佳。研究通过VTCBench测试系统揭示了AI存在"位置偏差"等问题,为视觉文本压缩技术的改进指明方向。
2025
04/22
17:35
分享
点赞

数智时代,openGauss Summit 2025即将发布哪些技术创新破局
“算力+储能”深度融合:超智算发布分布式算力超级节点储能解决方案
联想推出DE6600系列:更智能的存储解决方案
创业公司如何在严格监管行业中实现生死攸关的创新
OpenAI发布GPT-5.2-Codex模型,软件工程自动化能力大幅提升
Waterfox浏览器宣布拒绝AI功能,瞄准Firefox忠实用户
TikTok美国业务出售交易将于下月完成
破局AI数据中心安全瓶颈:Fortinet联合NVIDIA引领隔离式加速新航向
智算中心进化论,科华数据如何做到“更懂”
更高负载、更快建设:2026年数据中心六大趋势
Snowflake数据库更新引发全球大规模服务中断
AI编程初创公司Lovable融资3.3亿美元,英伟达等科技巨头支持
英特尔具身智能大小脑融合方案发布:构建具身智能落地新范式
对话伟景智能董霄剑:走一条不同于VLA的路,让人形机器人落地商用
第二届中国人形机器人与具身智能产业大会在京举办,十大典型落地场景发布
傅利叶发布首款开源人形机器人 Fourier N1, 加速行业生态共建
魔法原子人形机器人走出“练兵场”
“2025世界机器人大赛-首届具身智能机器人运动会”新闻发布会在无锡召开
傅利叶正式开源全尺寸人形机器人数据集Fourier ActionNet,并发布全球首个全流程工具链
Google 新型机器人 AI 能够折叠精致的折纸,并能安全关闭拉链袋
DeepSeek之后,中国人形机器人以“群体智能”再次掀起技术浪潮
学会跳舞的人形机器人,迎来了新一轮产业竞速
