
日本管机器人开车叫自动驾驶?马斯克看了两眼一黑
最近,日本除了汇率暴跌,北海道出现疑似变异的巨型章鱼外,又发生了一件有意思的事情。日本东京大学发布了一项最新成果,用一个人形机器人,驾驶一台带手刹的老年代步车。

难道日本这是发现了自动驾驶的新赛道,准备换道超车,一举超越特斯拉的自动驾驶技术?
用机器人开车,日本自动驾驶有点抽象
近日,东京大学研发了一款名叫“武藏”的人形机器人,它的设计灵感仿佛来源于科幻电影。该机器人身高为 160 公分,体重 50 公斤,全身拥有 74 个马达。其运作机制与人类相同,靠着骨骼支撑身体,并透过模仿肌肉的线缆等构造使手脚移动。采电力驱动,由专用电池供给。拥有仿生的骨架和肌肉系统,以及一双装有摄像头的眼睛,能够像真人一样观察四周的车辆和行人,确保驾驶安全。
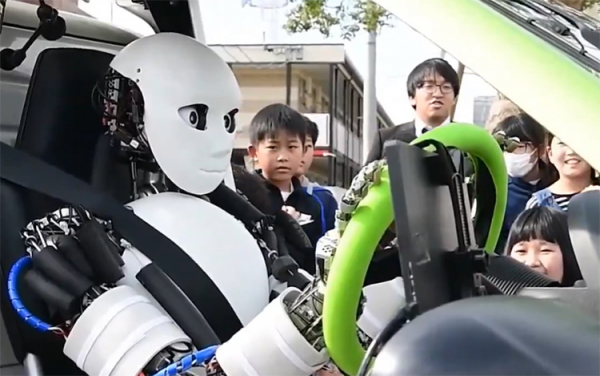
视频中,它驾驶一人座电动车外型类似我国的老年代步车,以时速 4 公里缓慢地行驶了约 20 公尺。另外,该机器人具备安全检测功能,当驾驶过程中旁边突然出现行人时,他会呼喊“谁在那里?危险!”,同时右脚离开油门、左脚踩刹车,将车子停下来。
更有趣的是,它的四肢装备了高灵敏度的传感器,使得它能够在某种意义上灵活地转动方向盘,精确控制油门和刹车,甚至是熟练地操作手刹。

只不过,这转弯时转动方向盘的动作着实抽象,颇有一种初学者考科目二时手忙脚乱的感觉。虽说动作略显奇葩,但车辆转弯确实完成的很好,但好像有点不对劲儿,谁家自动驾驶是研究个机器人司机来开车啊?
何为自动驾驶?点歪科技树的日本
自动驾驶这个词语对很多人来说并不陌生,许多科幻电影中也经常有相关的设定,如变形金刚的汽车形态,抑或是蝙蝠侠的座驾,这种自动驾驶是大部分人熟知的汽车自己行驶,完全不需要外力干预。另一种则是平行驾驶,在漫威电影《黑豹》中,妹妹在全息模拟的驾驶仓里远程操控汽车。

这两种看上去科幻感十足的方式,目前都已经在现实世界中得到了发展。平行驾驶理念最早由中科院自动化研究所王飞跃教授提出,延续了其在上世纪90年代在NASA主持的相关工作,本意是希望通过人类在地球端的操作远程控制在火星工作的无人车,这一“远程控制技术”可以说是平行驾驶的初级形态。
早在2022年,针对平行驾驶场景超低延迟的需求,火山引擎RTC通过采集、编码、传输全链路进行优化,使音视频端到端延时缩短至百毫秒以内。或许再过几年,遥控汽车将不再是玩具,而是真正能够上路行驶,保障车辆安全的成熟技术。
另一个则是大家所熟知的特斯拉汽车,从2014年开始,特斯拉便率先将无人驾驶技术应用于电动车领域,并在2016年展现出了部分无人驾驶功能。目前,特斯拉提供包括Autopilot自动驾驶辅助系统和高级的“全自动驾驶(FSD)”选项在内的先进驾驶辅助系统,后者向订阅用户收费199美元/月,而在今年8月特斯拉计划推出自动驾驶出租车(robotaxi),也就是说,特斯拉在无人驾驶领域已经走在了前列。

但如果马斯克看到日本这款机器人司机可能会两眼一黑,因为这脑洞实在是太大了,完全不走寻常路。马斯克在去年的特斯拉股东大会上表示,特斯拉汽车就是放在轮子上的机器人。这句话其实就意味着汽车与机器人的界限正在模糊,因为两者的核心在于智能算法和控制系统。但即便再模糊,自动驾驶也没必要真的制造出一个机器人司机来开车。
这不禁让我想到,创新工场董事长兼CEO、零一万物CEO李开复博士在2024北京智源大会上曾对具身智能所表述的看法,他认为许多智能造物并不一定要是人形的,而是应当以最合适的形态来进行工作,就比如扫地机器人就是一个很好的方式,没必要造一个人形扫地管家出来。
由此可见,日本这个试图让机器人开车来拓展自动驾驶的想法明显有一种科技树点歪了的既视感。这个研究项目的团队负责人是河原塚健人,今年2月,在ICRA 2024会议期间,他还参与组织了一场“烹饪机器人研讨会”。
在河原塚健人论文《Toward Autonomous Driving by Musculoskeletal Humanoids》中,他和团队提出,未来将扩展机器人的能力,不仅能够驾驶车辆,还要能够搬重物和做家务,打造一个通用人形机器人。当下的话,主要还是提高机器人的开车能力,比如改善手指结构的问题,可能会被方向盘卡住。
难道我们误会河原塚健人的团队了?他们的真实目的是研究通用人形机器人,而非自动驾驶。但这同样有些奇怪,毕竟如果人形机器人中的顶级公司还在训练其灵活性和四肢能力的时候,河原塚健人的团队又怎么会跳过基础直接开始功能性训练了呢。
人形机器人也不能一口吃成胖子
2024年,人形机器人的热度持续高涨,前有英伟达、OpenAI、微软、英特尔、亚马逊所支持的初创人形机器人公司因其会冲咖啡的机器人Figure01而爆火,后有特斯拉人形机器人Optimus自主叠衣服令人震惊。
众所周知,目前人型机器人领域中,波士顿动力公司和特斯拉算是最知名的两家了。今年四月,波士顿动力公司发布了最新的电动的Atlas机器人,新版机器人的关节经过了重新设计,可以灵活旋转,据称能够“胜任乏味、脏污和危险的任务”。
同样,特斯拉的擎天柱(Optimus)人形机器人,也正在通过外部遥控进行叠衬衫动作的训练来获得手部结构升级、触觉感知能力增强以及整体运动灵活性的提升。
在这种知名公司还在进行人形机器人的初级训练的时候,一个仅有十数人的团队居然已经开始训练机器人开车这种偏复杂的功能了,多少有些不真实。更何况从公布的视频中能看到机器人四肢协调程度并不顺畅,仿佛连走路都没学好就开始跑步了一样。
与之相比,同样是日本东京大学的研究团队,他们与河原塚健人的团队疑似好高骛远的行为不同,反而是专注于研究机器人脸。这个团队称他们成功培育出活体皮肤机器人脸,不仅能够展示出类似人类的微笑表情,还具备自我愈合的能力。

据了解,这项技术是将人类皮肤细胞生长在胶原蛋白模型上,然后放置于3D打印的树脂基座上制成。这种活体皮肤的外观和功能都与人类皮肤相似,不仅能够进行基本的面部表情,如微笑,还能够在受损时进行自我修复。
似乎这项机器人脸的研究更加务实,也更令人期待,毕竟皮肤和表情是每一个人形机器人去掉恐怖谷效应的最重要的手段。
写在最后
一个四肢不太协调的机器人当司机,不知道谁会放心坐上车。不过这种想法十分有趣,或许当机器人脸研究更加成熟后,人们很可能不知道周围谁是真人,谁是机器人。
随着消费者对智能科技产品需求不断增长,人形机器人也将成为新的消费热点。消费者可购买人形机器人作为家庭智能助手,享受更智能化的生活方式。但目前来看,距离这一设想仍有不远的距离,并且这个距离没有捷径,只能一步一个脚印的前进。
好文章,需要你的鼓励


奥运级别的努力:首席信息官为2026年AI颠覆做准备
AI颠覆预计将在2026年持续,推动企业适应不断演进的技术并扩大规模。国际奥委会、Moderna和Sportradar的领导者在纽约路透社峰会上分享了他们的AI策略。讨论焦点包括自建AI与购买第三方资源的选择,AI在内部流程优化和外部产品开发中的应用,以及小型模型在日常应用中的潜力。专家建议,企业应将AI建设融入企业文化,以创新而非成本节约为驱动力。

字节跳动发布GAR:让AI能像人类一样精准理解图像任何区域的突破性技术
字节跳动等机构联合发布GAR技术,让AI能同时理解图像的全局和局部信息,实现对多个区域间复杂关系的准确分析。该技术通过RoI对齐特征重放方法,在保持全局视野的同时提取精确细节,在多项测试中表现出色,甚至在某些指标上超越了体积更大的模型,为AI视觉理解能力带来重要突破。

Spotify推出AI播放列表功能让用户掌控推荐算法
Spotify在新西兰测试推出AI提示播放列表功能,用户可通过文字描述需求让AI根据指令和听歌历史生成个性化播放列表。该功能允许用户设置定期刷新,相当于创建可控制算法的每周发现播放列表。这是Spotify赋予用户更多控制权努力的一部分,此前其AI DJ功能也增加了语音提示选项,反映了各平台让用户更好控制算法推荐的趋势。

Inclusion AI推出万亿参数思维模型Ring-1T:首个开源的超大规模推理引擎如何重塑AI思考边界
Inclusion AI团队推出首个开源万亿参数思维模型Ring-1T,通过IcePop、C3PO++和ASystem三项核心技术突破,解决了超大规模强化学习训练的稳定性和效率难题。该模型在AIME-2025获得93.4分,IMO-2025达到银牌水平,CodeForces获得2088分,展现出卓越的数学推理和编程能力,为AI推理能力发展树立了新的里程碑。
2024
06/28
20:04
分享
点赞

