
极智AI | 解读Hamilton-Jacobi-Bellman (HJB)方程
HJB 方程的推导基于动态规划原理,其核心思想是将整个时间段的优化问题分解为无数个微小时间间隔内的优化问题。


这个示例代码的实现
下面以 Python 实现一个简单的 HJB 方程的数值求解,使用有限差分法求解上述示例中的HJB方程。
import numpy as npimport matplotlib.pyplot as plt# 参数设置T = 1.0 # 终止时间Nx = 100 # 状态变量离散化数量Nt = 1000 # 时间离散化数量x_max = 2.0 # 状态变量范围 [-x_max, x_max]dt = T / Ntdx = 2 * x_max / Nxx = np.linspace(-x_max, x_max, Nx+1)t = np.linspace(T, 0, Nt+1) # 时间从T到0逆向# 初始化价值函数 V(x, T) = 0.5 * x^2V = 0.5 * x**2# 使用向后时间步进for n in range(Nt):# 计算空间导数 dV/dxdVdx = np.zeros_like(V)dVdx[1:-1] = (V[2:] - V[:-2]) / (2 * dx)# 边界条件 (Neumann边界条件 dV/dx=0)dVdx[0] = (V[1] - V[0]) / dxdVdx[-1] = (V[-1] - V[-2]) / dx# 更新价值函数 V_t + 0.5*(V_x)^2 = 0V_new = V - dt * 0.5 * (dVdx)**2V = V_new.copy()# 可视化结果plt.figure(figsize=(8,6))plt.plot(x, V, label='价值函数 $V(x, 0)$')plt.xlabel('状态变量 $x$')plt.ylabel('价值函数 $V$')plt.title('HJB 方程数值解')plt.legend()plt.grid()plt.show()# 计算最优控制策略 u*u_star = -dVdxplt.figure(figsize=(8,6))plt.plot(x, u_star, label='最优控制 $u^*$')plt.xlabel('状态变量 $x$')plt.ylabel('控制变量 $u^*$')plt.title('最优控制策略')plt.legend()plt.grid()plt.show()
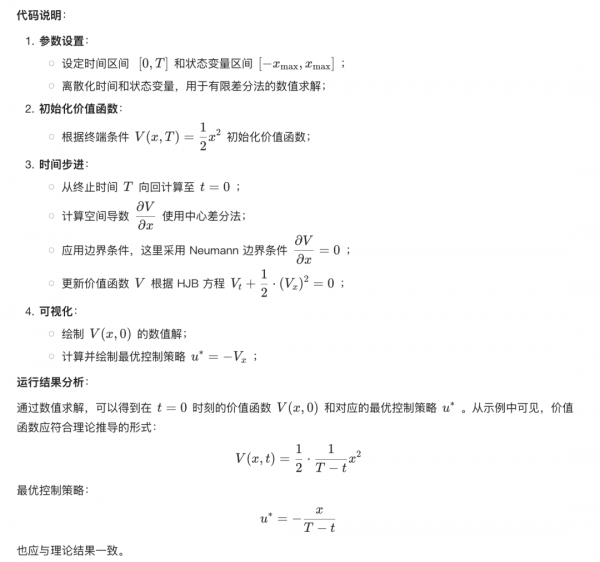
HJB 方程是解决动态优化和最优控制问题的强大工具。通过动态规划原理,HJB 方程将复杂的优化问题转化为偏微分方程的求解问题。尽管在高维情况下数值求解 HJB 方程可能面临维度灾难,但在低维或具有特定结构的问题中,HJB 方程提供了清晰的解析或数值解法。
好文章,需要你的鼓励

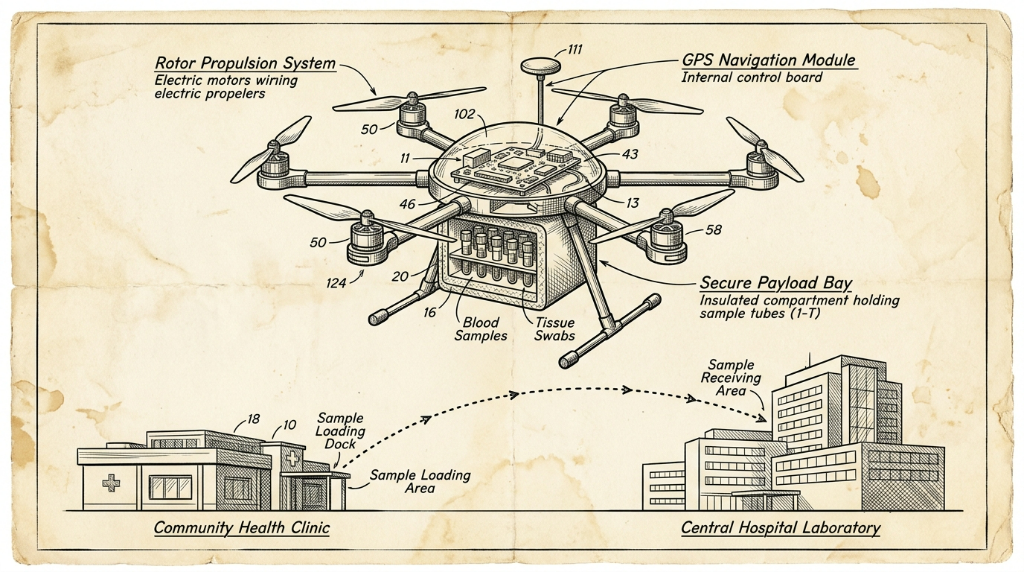
英国NHS无人机快递医疗样本服务正式落地伦敦
英国国家医疗服务(NHS)正将无人机纳入常规医疗物流体系。自今年2月起,无人机每天在雷恩斯公园和圣乔治医院之间运送血液等诊断样本,飞行仅需3分钟,比公路运输快约85%,且碳排放减少高达98%。目前已有逾2000名患者受益。NHS计划将该服务扩展至圣赫利尔、克罗伊登等多家医院,最终惠及约180万名患者。该网络由英国医疗初创公司Apian与谷歌旗下Wing合作运营。
Explyt团队打造的代码智能体评测新标准:光靠“通过/失败“根本不够用
AgentLens是Explyt公司联合俄罗斯学术机构开发的AI编程助手评测基准,通过分析完整人机交互轨迹而非仅看最终结果,从五个维度评估代码智能体的真实表现。
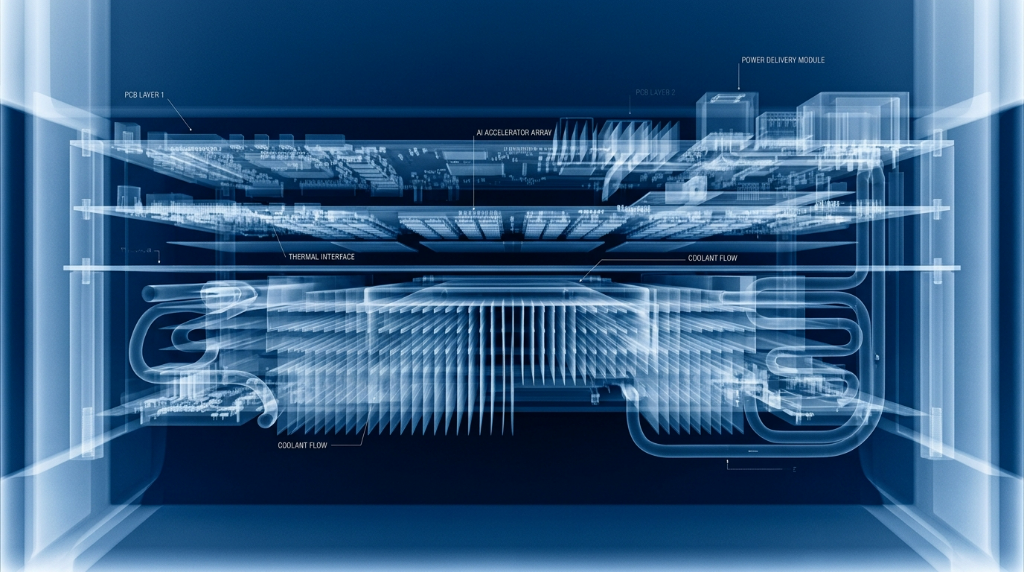
Aetina宣布支持英伟达Jetson T3000和T2000 AI模块
边缘AI计算厂商Aetina宣布,将在其DeviceEdge AIE-KT风冷系列和新款AIE-PT无风扇平台上支持英伟达全新Jetson T3000和T2000模块。T3000基于Blackwell GPU,最高提供865 FP4 TFLOPS算力,功耗70W;T2000则提供400 FP4 TFLOPS,面向视觉AI代理和自主移动机器人等场景。两款模块预计2027年第一季度上市,支持Nemotron、Cosmos 3等英伟达AI软件生态。
机器人的“触觉觉醒“:韩国梨花女子大学如何让小型AI模型在不忘记视觉的前提下学会“感受“材质
韩国梨花女子大学提出Splash框架,通过识别AI模型中的"休眠参数"并只在其中训练触觉能力,让小型多模态AI在学会感知材质触感的同时,完整保留原有视觉语言推理能力。

