
精灵宝可梦 GO 迎来新东家,而 Niantic 正借助 AI 和 AR 重塑地图业务
你下一次玩精灵宝可梦 GO 时可能会发现一些变化。这款游戏即将迎来新的公司掌舵者。与此同时,前母公司 Niantic 另有规划:未来将减少在游戏方面的投入,转而专注于利用这些游戏数据来生成 AI 地图。我已经看到了这个未来的一些雏形,而 AR 眼镜可能只是这一宏大蓝图中的一个组成部分。
不过,游戏仍然会继续存在。Niantic 保留了 Ingress 和 Peridot 这两款最注重增强现实、位置和地图连接的游戏的控制权。这些游戏,加上 Niantic 进一步转型为 Niantic Spatial,可能预示着未来的发展方向:科技公司开始探索如何让 AI 理解我们周围的世界,而不是重复 Meta Ray-Bans 等 AI 眼镜失败的尝试。
Niantic 对此消息没有额外评论。不过,我最近体验了专为 Quest 开发的 Scaniverse 应用 (该应用于 2021 年被收购)。这款应用主要用于发现真实世界位置的现有 3D 扫描,类似于 Polycam 等其他 3D 扫描应用,Scaniverse 专注于创建和查看位置数据。但是,Niantic 未来的计划可能更侧重于利用精灵宝可梦 GO 玩家长期积累的这些数据来训练 AI。如果要让 AR 和常开型可穿戴 AI 真正发挥作用,我们需要更好地掌控数据共享的方式和时机。
从 Niantic 的角度来看,下一步将聚焦于将这些扫描地图作为 AI 的数据来源。
Niantic CEO John Hanke 在 LinkedIn 发文表示:"我们正处于技术的剧变期,AI 正在快速发展。现有的地图是为人类阅读和导航而建造的,但现在我们需要一种新型地图,让机器能够理解世界,从智能眼镜到人形机器人,都能理解和导航物理世界。当今的大语言模型是朝着这个未来迈出的第一步,在这个未来中,各种专家模型将协作解决复杂问题,而这些问题中的许多都需要对物理世界有深入准确的认知。Niantic 正在构建能帮助 AI 突破屏幕限制、走入现实世界的模型。"
Niantic 已经开始专注于为手机和 Meta Quest 等头显设备的 AR 和 VR 体验扫描现实世界,主要是为了展示当你再次步入这些逼真的 3D 扫描时有多么有趣。像 Polycam 这样的公司 (我在 Vision Pro 上也体验过他们令人印象深刻的真实环境 3D 扫描) 已经在探索将这些扫描用于更多商业目的。Niantic 对他们的扫描技术也提出了相同的主张。这些扫描背后的技术被称为高斯散射,是通过多张照片和深度感知数据生成的。
AI 通过研究这些高级扫描来理解和导航现实世界的想法是一个全新的层次,但这并不令人意外。AR 和 VR 已经成为 AI 和机器人技术的训练场,而我们通过佩戴智能眼镜和其他世界映射可穿戴设备收集的数据集,必然会成为生成式 AI 下一步研究的对象。这很可能会成为 Meta、Google,最终也包括 Apple 等公司的重要基础,用于让现实世界中的 AR 眼镜真正发挥作用,并通过 AI 识别周围的事物。
Meta 和 Google 等公司已经在使用配备传感器的智能眼镜原型来探索构建具有 AI 实时世界感知辅助系统。Project Aria 和 Project Astra 是未来具有持续感知能力的智能眼镜的基础,但它们仍然缺乏对世界更深入的、有帮助的认知。利用 3D 扫描地图数据进行训练可能是下一个飞跃的重要组成部分,这最终将应用于 Meta 的 Orion AR 眼镜原型和 Google 的 Android XR 设备等产品中。
Niantic 并不是唯一一家专注于将现实世界扫描到未来地图中的公司:Google、Apple、Snap 以及包括 Polycam 在内的许多其他公司都在这么做。Niantic 目前的定位似乎更倾向于 AI,但 AI 和 AR 似乎注定要融合。我仍然不理解各家公司收集的地图数据和个人数据是如何被清晰区分的。而当 Niantic 从游戏转向专注于 AR 的未来时,这既引发了好奇,也带来了担忧。
好文章,需要你的鼓励

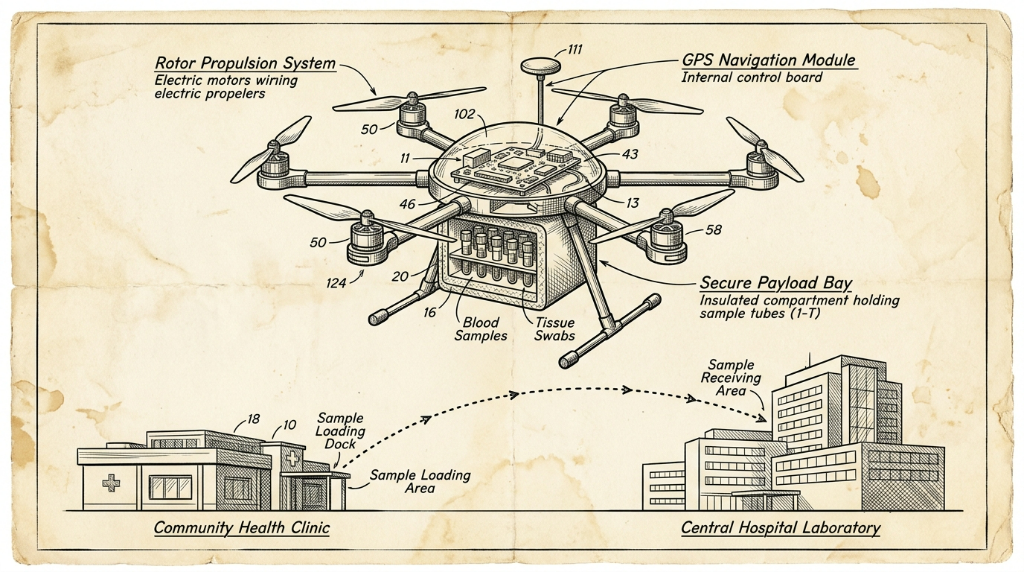
英国NHS无人机快递医疗样本服务正式落地伦敦
英国国家医疗服务(NHS)正将无人机纳入常规医疗物流体系。自今年2月起,无人机每天在雷恩斯公园和圣乔治医院之间运送血液等诊断样本,飞行仅需3分钟,比公路运输快约85%,且碳排放减少高达98%。目前已有逾2000名患者受益。NHS计划将该服务扩展至圣赫利尔、克罗伊登等多家医院,最终惠及约180万名患者。该网络由英国医疗初创公司Apian与谷歌旗下Wing合作运营。
Explyt团队打造的代码智能体评测新标准:光靠“通过/失败“根本不够用
AgentLens是Explyt公司联合俄罗斯学术机构开发的AI编程助手评测基准,通过分析完整人机交互轨迹而非仅看最终结果,从五个维度评估代码智能体的真实表现。
Aetina宣布支持英伟达Jetson T3000和T2000 AI模块
边缘AI计算厂商Aetina宣布,将在其DeviceEdge AIE-KT风冷系列和新款AIE-PT无风扇平台上支持英伟达全新Jetson T3000和T2000模块。T3000基于Blackwell GPU,最高提供865 FP4 TFLOPS算力,功耗70W;T2000则提供400 FP4 TFLOPS,面向视觉AI代理和自主移动机器人等场景。两款模块预计2027年第一季度上市,支持Nemotron、Cosmos 3等英伟达AI软件生态。
机器人的“触觉觉醒“:韩国梨花女子大学如何让小型AI模型在不忘记视觉的前提下学会“感受“材质
韩国梨花女子大学提出Splash框架,通过识别AI模型中的"休眠参数"并只在其中训练触觉能力,让小型多模态AI在学会感知材质触感的同时,完整保留原有视觉语言推理能力。
2025
03/13
16:11
分享
点赞

小艺Claw 新用户专属福利:7天0元体验,500 AI点免费领
京深联动打通AI硬件出海全链路!深圳模力营生态对接会?北京站成功举办
阿里开源0.8B文档解析模型,端到端模型首次超越流水线方法
《Java纪录片》:讲述Java三十年的兴衰与重生
AMD太阳神Helios官宣,四驾马车伴行,苏姿丰:CPU可能跑得最快
网络安全不止于拦截:协作才是应对之道
NetworkManager 1.58 正式发布:强化 IPv6 支持、Wi-Fi 管理与安全性
施耐德电气升级版Charge Pro电动车充电桩现已支持NACS接口
AMD推出Helios AI机架系统,正面挑战英伟达
WAIC 2026:AI算力竞争,正在进入"架构创新"时代
6G与AI双向奔赴:构筑面向2030年代的智能网络
Patreon裁员20%,共涉及93名员工
AI 时代的数据中心:未来十年规划展望
AI 编程助手拒绝写代码,建议用户自学编程
超越 ChatGPT:通往通用人工智能的 5 大挑战
Oracle 在 AI 主流化方面具有重大优势
Snap 推出基于自研生成模型的 AI 视频滤镜
Google 的 Gemma 3:一款支持 128K 上下文窗口的开源单 GPU AI 模型
精灵宝可梦 GO 迎来新东家,而 Niantic 正借助 AI 和 AR 重塑地图业务
Google 的 Gemini 2.0 Flash 原生多模态 AI 图像生成功能给人留下深刻印象
Google 推出两款全新 AI 机器人控制模型
Nvidia 赢得了 AI 训练竞赛,但推理市场仍未尘埃落定
