
为落地真实场景而生,跨维智能发布第二代人形机器人DexForce W1 Pro
7月27日,WAIC世界人工智能大会上,跨维智能进行了全新一代人形机器人 DexForce W1 Pro 的线下发布会,作为 W1 的迭代升级款,其在机器人本体软硬件算法与开发工具链上实现全方位革新,面向各个行业的用户提供丰富的硬件配置选择与 EmbodiChain 具身智能开发平台。

DexForce W1 Pro 将强大的机器人硬件,与原生智能核心(X-Wiz),开放的具身智能开发平台(EmbodiChain)无缝融合,致力于在真实世界中执行高精度、高可靠性的复杂任务。
落地驱动:价值需求牵引,具身操作赋能多样场景
不同于停留在“实验室环境”的基于舵机方案的实验用机器人,或是主要服务于“情绪价值”的基于准直驱方案的展示用机器人,一个能创造真实价值的精巧操作型机器人,必须在核心零部件、机身构型、电路设计及控制算法上实现深度耦合,从而达到产品级的高稳定性、高精度、高柔性与长时运行能力。
DexForce W1 Pro 正是为践行此理念而生。它融合了 X-Wiz 提供的模块化多层次开发接口,并借助 EmbodiChain 赋予的强大数据扩增与生成能力,能够在真实场景的作业需求牵引下,自主完成高精度、高稳定性的机器人任务。其主要技术特点如下:
- 高精度纯视觉三维感知:自研新一代双目纯视觉传感器 + 通用感知大模型
- 亚毫米级精准作业:全身谐波关节 + 全向运动底盘 + 灵活末端执行器配置
- 具身智能新范式:Engine-driven Sim2Real VLA
基于 DexForce W1 Pro 这一强大的硬件平台,开发者无论使用合成数据还是真实数据,都能拥有“产品级”的机器人技能。这些高级技能已准备好在以下多样化场景中充分释放价值,其核心落地优势体现在:
- 科研教育:为前沿的 VLA 模型训练与机器人技能学习,提供一个高可控、高精度的理想研究平台。
- 家庭助理:精准执行整理桌面、递送物品、辅助备餐等家务指令,成为安全可靠的家庭帮手。
- 商业服务:在展会、酒店、零售等场景中胜任迎宾、导览和产品介绍等角色,全面提升服务体验与运营效率。
- 智能制造:高效胜任产线上的高精度柔性装配、带操作巡检、物料分拣等一系列复杂任务。
双版本配置:聚焦核心需求,适配多元场景
本次预售的 DexForce W1 Pro 版本延续 “模块化架构” 理念的同时,为方便不同需求开发者,跨维也推出无底盘功能的 DexForce W1 Core 版本,两者核心差异在于底盘配置,而腿部以上的感知系统、执行系统、控制核心与软件平台完全一致:
- W1-Pro:可选配差速/全向移动底盘,全身具备 34/40 个自由度,将通用智能机器人的感知、移动、操作和智能提高到了一个全新的高度。
- W1-Core:保留腿部以上核心模块(双臂、躯干、头部),整体专注于原地作业的应用场景,为不需要移动能力的用户提供更高性价比的选择。
硬核焕新:从感知精度到运动性能的全方位跃升
DexForce W1 Pro 的硬件革新围绕着“为落地真实场景”而打造,在视觉感知与机械运动层面均实现突破性的提升。
“毫厘可见”:全新自研纯视觉双目系统,感知能力质的飞跃

头部集成的自研纯视觉双目仿人传感器迎来全面升级:帧率从初代的 15Hz 提升至 60Hz,提升了四倍。通过优化光学模组与标定算法,双目标定误差控制在 ±0.05 像素以内,立体匹配精度达亚像素级( ≤0.1 像素),较初代提升 40%;可实时输出稠密点云与深度图,对物体三维轮廓的还原误差 ≤1mm,较初代提升 25%。双目拍照同步性能 20us 以内,工业级同步水准。整体功率降低为初代的三分之一,高温状态下的稳定性能得到进一步提升。视场角进一步优化至水平 90°、垂直 60° 的仿人视野范围。
配合腕部近距离操作相机(FOV 87° × 58°,工作距离 7-50cm)与底盘前后深度相机(工作距离0.2-2.5m ),构建全域感知网络,为纯视觉抓取、动态场景理解等任务提供高精度数据输入。
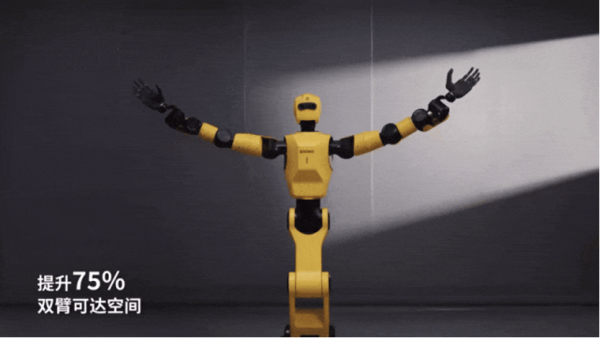
“稳控微毫”:双臂运动性能迭代,可达性与操作精度双提升
基于初代 7 自由度机械臂架构,新一代 W1 Pro 通过基于 AI 的 Co-design 优化运动学模型及机械构型参数,将双臂工作空间及可达性扩展 75%,实现更复杂的交叉操作与狭小空间避障。结合视觉系统,重复定位精度提升至 ≤0.5mm,机械手可选配 6 自由度灵巧手和二指夹爪,按需选配,轻松应对工业和商用等场景。
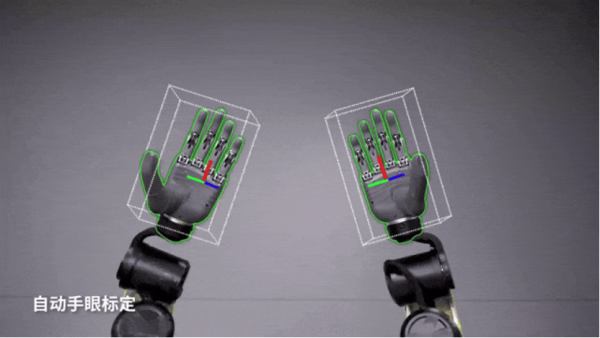
机器人在长时间运行后“手”和“眼”的相对位置会发生极其微小的改变,但是这种改变会极大地影响高精度任务的执行。为此,W1 Pro 引入“自动手眼标定”功能,时刻感知自己的状态,并在需要调整的时候快速自主的完成“手眼标定”,为持续的高精度任务保驾护航。
软件升维:推出 EmbodiChain 具身平台,建设开发者友好型生态
新一代 W1 Pro 的软件能力完成了革命性升级:首次重磅推出开源具身智能开发平台——EmbodiChain,一个专为解决具身智能模型训练数据稀缺问题而生的强大工具集。依托跨维 DexVerse™ 统一技术底座的强力驱动,EmbodiChain 以领先的数据生成与仿真引擎,将“昂贵、低效”的真实数据采集升级为“低成本、大规模、可扩展”的机器人双臂操作技能数据管线,支持离线与在线两种数据模式。
这一创新性的“引擎驱动”范式不再是静态数据集,而是构筑起面向 AGI 的持续飞轮。这套前瞻性蓝图的核心理念与部分代码实现,将逐步在我们最新推出的开源具身智能开发平台 EmbodiChain 中落地,向所有开发者开放。
核心亮点:开源具身智能开发平台 EmbodiChain
- 强大的数据引擎:EmbodiChain 的数据引擎将会包括大量场景相关数据生成,Real2Sim 的数据轨迹映射,大规模多数据模态扩增。其先进的生成式数据扩增能力,更能自动创造出海量、高质量且多样化的操作样本,从根本上解决了真实数据采集的成本与多样性瓶颈。
- 高效的模型训练:平台内置的 Sim2Real VLA 基础模型,其性能与覆盖范围经过持续优化,预训练数据已覆盖多种典型操作任务。用户可利用便捷的在线微调功能,显著提升模型面对新任务时的收敛速度,从而极大加速从“虚拟训练”到“现实部署”的闭环迭代。
同时,由 EmbodiChain 所训练产出的 VLA 模型可以无缝接入到 W1 的软件生态中(X-Wiz),确保了开发者在进行顶层创新时,可以简单快速地在真机上验证算法效果。
WAIC 现场互动体验,共同迈向通用物理世界智能
DexForce W1 Pro 的发布,标志着跨维智能在 “硬件性能 + 软件生态” 双轮驱动的技术路线上迈出关键一步。从敏锐的动态视觉捕捉到精准的实时轨迹控制,从对物理世界的高保真数字还原到模型训练的效率跃升,我们正在构建一套能够落地于真实世界的具身智能开发范式。
展望未来,我们将聚焦于三大方向的持续迭代:进一步增强 W1 在各种环境下的感知鲁棒性;提升 EmbodiChain 平台的在线数据生成及训练模型的效率;不断拓展 W1 的技能和落地场景。我们相信,当硬件性能与软件效率形成合力,具身智能的边界将被不断拓宽。

目前,DexForce W1 Pro 版与 Core 版已同步开启预售,我们诚邀您莅临WAIC H3馆B124展台现场体验。跨维智能期待与所有生态伙伴一同探索具身智能的下一个技术奇点,向着通用物理世界智能的目标稳步迈进。
好文章,需要你的鼓励


特斯拉“完全自动驾驶“欺诈诉讼在华首次开庭,10位车主索赔583万元
北京法院就特斯拉"完全自动驾驶"(FSD)软件消费欺诈案举行首次听证,10名车主合计索赔逾395万元人民币。原告于2019至2021年间各付约5.6万元购买FSD套餐,指控特斯拉夸大功能、隐瞒硬件限制,且该系统未获中国监管批准。特斯拉随后将该功能更名为"特斯拉辅助驾驶",被视为对原名称误导性的默认。

韩国科学技术院研发的“万能图书管理员“:一套系统,搞定所有类型的知识库检索
韩国科学技术院提出OmniRetrieval框架,通过智能来源选择、原生查询生成和跨来源证据筛选,让一个系统统一检索文本库、数据库、知识图谱和属性图四类异构知识源。

微软发布ASSERT工具:用文字描述即可生成AI行为测试
微软发布开源框架ASSERT(自适应规范驱动的评估与回归测试工具),帮助开发者更便捷地测试AI系统在特定应用场景中的行为是否符合预期。开发者只需用自然语言描述AI模型的目标、策略或预期行为,ASSERT便会自动生成结构化测试用例并对结果评分,同时记录AI系统的执行路径,便于排查问题。该工具支持在开发、部署及持续监控阶段使用,填补了通用评估工具在应用场景定制化方面的不足。

上海人工智能实验室打造“AI安全卫士“:用不到千条数据,让小模型超越GPT-5.4的安全审核能力
上海人工智能实验室提出AgentDoG 1.5,仅用约1000条训练样本训练出0.8B至8B的轻量级AI代理安全审核模型,在多项基准测试上媲美GPT-5.4等顶级商业模型,同时支持安全训练和实时在线防护部署。
2025
07/27
16:05
分享
点赞

微软发布ASSERT工具:用文字描述即可生成AI行为测试
Gogs 严重漏洞长期未修复,开源项目局限性引发关注
Ubuntu 26.04:Canonical为智能体时代打造的AI操作系统
微软Work IQ:押注智能体优先的企业IT新时代
戴尔推出599美元XPS 13笔记本,正面迎战MacBook Neo
Salesforce收购Informatica六个月后,CIO们该知道什么
AI重塑招聘优先级,H-1B签证开发者面临更严峻就业市场
DuckDuckGo在谷歌AI搜索改版后持续走红,iPhone用户增势尤为突出
Perplexity Computer新功能:本地与云端模型智能协同分配任务
微软CEO:计算平台正从操作系统与应用转向智能体时代
谷歌 Phone 应用推出基于 RCS 的 Android 虚假来电检测功能
六月 Android 更新:Quick Share 扩展兼容 AirDrop、AI 加持 Play Books 等新功能,Android 17 即将到来
魔法原子携“全家族”产品亮相 WAIC,小人形与四轮足成全场焦点
当科幻照进现实:傲鲨首款消费级外骨骼机器人 VIATRIX 惊艳亮相 WAIC 2025
傅利叶WAIC 2025:带来 GR-3 新品首秀,开启具身智能康养新概念
地瓜机器人胡春旭:大小脑是具身智能的必经之路,百TOPS算力起步
Hugging Face 表示其新型机器人模型高效到可在 MacBook 上运行
五大机器人团队谈:人形机器人的卡点和破局之道
地瓜机器人完成1亿美元A轮融资,加速构建具身智能生态版图
为何 Intempus 认为机器人应具备人类生理状态
第二届京津冀智能制造装备协同发展大会在津举行 共绘智能制造新蓝图
傅利叶十年,升级核心战略:赋能于人,做“有温度”的具身智能
